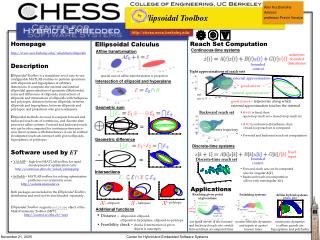
Ellipsoidal Toolbox
Continuous-time systems. unknown bounded disturbance. bounded control. Tight approximations of reach sets. special case of affine transformation is projection. external approximation. good curves. Intersection of ellipsoid and hyperplane. internal approximation.

Ellipsoidal Toolbox
E N D
Presentation Transcript
Continuous-time systems unknown bounded disturbance bounded control Tight approximations of reach sets special case of affine transformation is projection external approximation good curves Intersection of ellipsoid and hyperplane internal approximation good curves – trajectories along which external approximation touches the internal Geometric sum Backward reach set • if v(t) is fixed, then • open-loop reach set = closed-loop reach set • if v(t) is unknown disturbance, then • closed-loop reach set is computed • Forward and backward reach set computation = center trajectory Geometric difference Discrete-time systems fixed input bounded control Discrete-time reach set = • Forward reach sets can be computed • also for singular A[k] • Backward reach set computation • allows only nonsingular A[k] Intersections Applications Reaching given point at given time Switching systems Affine hybrid systems phase plot backward reach set state 1 – polytope target state – ellipsoid – halfspace Additional functions initial state system 1 system 2 state 2 • Distance – ellipsoid-to ellipsoid, • ellipsoid-to hyperplane, ellipsoid-to-polytope • Feasibility check – checks if intersection of given • objects is nonempty forward reach set system 3 guard use good curves of the forward and backward reach sets: switch between them at computed time system switches dynamics and inputs at apriori known times continuous dynamics is affine; guards are hyperplanes and polyhedra • Alex Kurzhanskiy • Advisor: • professor Pravin Varaiya Ellipsoidal Toolbox • Homepage • http://www.eecs.berkeley.edu/~akurzhan/ellipsoids • Description • Ellipsoidal Toolboxis a standalone set of easy-to-use configurable MATLAB routines to perform operations with ellipsoids and hyperplanes of arbitrary dimensions. It computes the external and internal ellipsoidal approximations of geometric (Minkowski) sums and differences of ellipsoids, intersections of ellipsoids and intersections of ellipsoids with halfspaces and polytopes; distances between ellipsoids, between ellipsoids and hyperplanes, between ellipsoids and polytopes; and projections onto given subspaces. • Ellipsoidal methods are used to compute forward and backward reach sets of continuous- and discrete-time piecewise affine systems. Forward and backward reach sets can be also computed for continuous-time piece-wise linear systems with disturbances. It can be verified if computed reach sets intersect with given ellipsoids, hyperplanes, or polytopes • Software used by ET • YALMIP – high-level MATLAB toolbox for rapid • development of optimization code: • http://control.ee.ethz.ch/~joloef/yalmip.php • SeDuMi – MATLAB toolbox for solving optimization • problems over symmetric cones: • http://sedumi.mcmaster.ca • Both packages are included in the Ellipsoidal Toolbox distribution and need not be downloaded separately. • Ellipsoidal Toolbox supports polytope object of the Multi-Parametric Toolbox (MPT): • http://control.ee.ethz.ch/~mpt Reach Set Computation Ellipsoidal Calculus Affine transformation cut at t = 5 Center for Hybrid and Embedded Software Systems