Informatica industriala
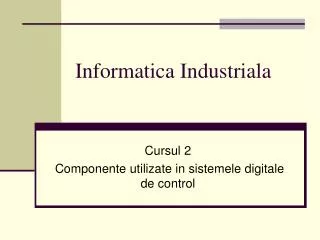
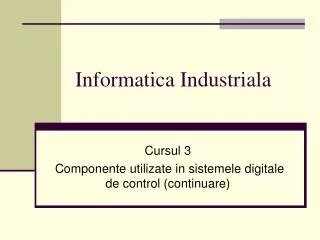
Informatica industriala. Cursul 8 – Elementele unui sistem de reglaj. ε. VE. VP. C. Proces controlat. Elem. de execuţie. Regulator. m. +. -. VM. Traductor. Elemente de executie.

Informatica industriala
E N D
Presentation Transcript
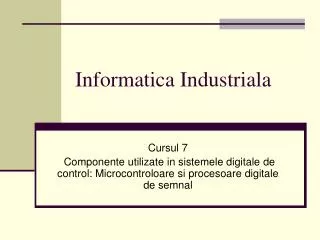
Informatica industriala Cursul 8 – Elementele unui sistem de reglaj
ε VE VP C Proces controlat Elem. de execuţie Regulator m + - VM Traductor Elemente de executie • Elementele de acţionare sau de execuţie sunt dispozitive de automatizare care transmit procesului controlat comanda generată de sistemul de control • Exemple: robinet, element de incalzire, motor electric, etc. • Constructiv au 2 parti: • o parte motoare (de acţionare) şi • o parte de execuţie
Clasificarea elementelor de acţionare • după natura modulului de acţionare: • electrice: • motoarele electrice rotative şi liniare (solenoid cu miez), • motoarele pas-cu-pas – • usor de controlat digital • nu necesita senzor de pozitie • dezvolta putere/forta foarte mica • motoarele de curent continuu, • control relativ simplu prin nivel de tensiune sau in impulsuri (PWM) • necesita senzor de deplasare, turatie sau viteza • putere dezvoltata medie • motoare de curent alternativ • greu de controlat, necesita schema complexa de actionare • dezvolta putere mare • pneumatice si hidraulice • dezvolta putere mare • folosite in medii explozive • necesita instalatii speciale pentru transmiterea agentului de actionare (aer comprimat, ulei)
UR Alimentare în triunghi α P= 3*U2/R = 3* 3*2302/R C1 C1 C2 C2 230V*√3 230V*√3 230V 230V 230V Alimentare în stea P= 3*U2/R = 3* 2302/R Clasificarea elementelor de acţionare • după natura modulului de execuţie: • electrice: • rezistente de incalzire: • control prin comutare • in impulsuri (PWM) • comutatoare: • electro-mecanice – relee • semiconductoare - tiristoare • mecanice
Q Q Q d d d a. liniar c. rapid b. logaritmic Clasificarea elementelor de acţionare • după natura modulului de execuţie(continuare) • dispozitivelor de execuţie mecanice: • tipuri constructive: • ventile, • valve • robinetele • obiectivul urmarit: • controlul liniar al gradului de deschidere al robinetului (a) • controlul uniform al debitului de fluid (b) • deschiderea sau închiderea cât mai rapidă a fluxului de fluid (c) • reducerea căderii de presiune şi eliminarea vârtejurilor • creşterea anduranţei, etc.
a. b. Clasificarea elementelor de acţionare • după natura modulului de execuţie(continuare) • dispozitivelor de execuţie mecanice: • Dispozitive de reglare a debitului: • cu clapetă (a), • cu registru (b)
Poziţie prescrisă Control cuplu Control poziţie Control viteză Δ Δ Δ cuplu poziţie Motor Sarcină viteză T.C T.V. T.P. Schema unui sistem de poziţionare Controlul elementelor de acţionare • precizia elementelor de executie este limitata: • erori de neliniaritate • erori la capete de scala • Solutia: sisteme cu reactie inversa pentru ajustarea erorilor • Exemplu: sistem de pozitionare, cu controlul cuplului, a vitezei si a pozitiei
ε VE VP C Proces controlat Regulator Elem. de execuţie m + - VM Traductor Regulatoare • componenta “inteligentă” al unui sistem de reglare • Funcţia de reglaj, (funcţia de transfer a regulatorului) indică dependenţa dintre semnalul de comandă generat şi abatere • reglaj: • liniar - ideal • neliniar - real
Clasificarea regulatoarelor • după natura semnalului de comandă generat: • regulatoare continue – semnalul de comandă este o funcţie continuă în raport cu abaterea şi cu timpul (ex.: regulatoare P, PI, PID, etc.) • regulatoare discontinue – semnalul de comandă este o funcţie care are discontinuităţi în raport cu abaterea (ex.: regulatoare bipoziţionale, tripoziţionale şi în mai multe trepte) • discrete – semnalul de comandă este o funcţie discretă în timp, adică se generează impulsuri modulate în amplitudine, frecvenţă, factor de umplere sau se generează informaţii codificate binar
Clasificarea regulatoarelor • după tehnologia folosită pentru implementarea funcţiei de reglaj • regulatoare mecanice, hidraulice, pneumatice – se folosesc componente mecanice, hidraulice sau pneumatice mai mult sau mai puţin standardizate; este dificil de implementat o funcţie de reglaj, optimă din punct de vedere teoretic, • regulatoare electronice sau analogice – se folosesc componente electronice active (tranzistor, amplificator operaţional) şi pasive (rezistenţă, condensator, bobină); precizia de implementare a funcţiei de reglaj depinde de precizia componentelor • regulatoare digitale sau numerice – utilizează componente digitale (porţi logice, bistabile, etc.), inclusiv microprocesor; funcţia de reglaj se implementează printr-o schemă logică sau prin program; în ultimul caz pot fi implementate funcţii complexe de reglaj, iar precizia de reglaj nu depinde de precizia componentelor
Clasificarea regulatoarelor • după mărimea constantelor de timp implicate • regulatoare pentru procese lente – constantele de timp ale procesului sunt foarte mari (peste zeci de secunde); exemple: reglare temperatură, nivel, concentraţii de gaze • regulatoare pentru procese rapide – constantele de timp sunt relativ mici (sub câteva secunde); exemplu: reglarea turaţiei motoarelor, poziţionare, reglare presiune • după legea de reglare • regulatoare de prag – bipoziţionale sau tripoziţionale • regulatoare continue, proporţionale (P), proporţional-derivative (PD), proporţional-integrative (PI) şi proporţional-integrativ-derivative (PID) • după gradul de adaptabilitate • regulatoare clasice (neadaptive) – coeficienţii de reglaj se acordează manual • regulatoare autoadaptive – coeficienţii de reglaj se acordează automat
Răspunsul unui sistem la un semnal de tip treaptă unitară • necesar pentru a stabili comportamentul sistemului, in vederea realizarii unui reglaj adecvat • metode de determinare: • pe cale analitica: pe baza unor legi fizico-chimice • mai exacta dar greu de surprins in formule un proces real • pe cale experimentala: prim masurare • se presepune ca sistemul are o constanta de timp principala – sistem liniar descris printr-o ecuatie diferentiala de gradul intai • raspunsul sistemului la un impuls Dirac ar permite identificarea completa a sistemului • varianta practica -> raspunsul sistemului la semnal de tip de tip treapta unitara (cuplarea comenzii la valoarea nominala)
y(t) εst εmax yst t tm t0 ttranz u(t) Raspunsul sistemului la un semnal de tip treapta unitara • u(t) – semnalul de comanda (treapta unitara) • y(t) raspunsul sistemului ; yst – iesirea stationara • εmax- abaterea maxima ; εst – abaterea stationara • tm – timpul mort • t0 – constanta de timp • ttranz – perioada de tranzitie
Algoritmi de reglare • alegerea schemei/algoritmului de reglaj se face pe baza urmatorilor parametrii ai procesului controlat: • timpul mort şi constanta de timp a sistemului • precizia solicitată (eroarea staţionară admisă) • abaterea maximă admisă • timpul maxim de atingere a valorii prescrise • timpul maxim de tranziţie • costul maxim admis • gradul de stabilitate al sistemului
VP+εp VP-εp VM C VP ε t -εp +εp C Reglaj bipoziţional • cuplarea si decuplarea comenzii, in jurul valorii prescrise, • este in functie de marimea abaterii • se alege un domeniu de histerezis: [-εp, + εp]
Reglaj bipozitional • Avantaje: • simplu, usor de implementat • multe elemente de actionare/executie au 2 stari • Dezavantaje: • precizie scazuta • semnalul de iesire variaza in plaja de histerezis • apare o abatere stationara nenula • Varianta inbunatatita: reglaj tri-pozitional • 3 valori pt. comanda: nul, maxim si mediu • reglaj mai fin, precizie mai buna decat reglajul bipozitional
Reglaj liniar continuu – regulatoare PID • valoarea comenzii depinde de valoarea momentata a abaterii si de evolutia acesteia • Reglaj proporţional – regulator de tip P • comanda este proportionala cu abaterea c(t) = Kp * ε(t) = Kp*(VP-VM(t)) unde: c(t) – comanda la momentul t ε(t) – abaterea (eroarea) la momentul t Kp – factorul de proportionalitate VP – valoarea prescrisa VM(t) – valoarea masurata la momentul t Bp = 1/ Kp*100 [%] - banda de proportionalitate
VM Bp εst VP t ε(t) c(t) Reglaj liniar continuu – regulatoare PID • Regulator P (cont.) • caracteristici: • precizie mai buna decat in cazul reglajului bi- sau tri-pozitional • nu se tine cont de evolutia anterioara a abaterii • nu se recomanda pentru sisteme cu timp mort mare • daca abaterea este mare comanda nu mai este proportionala cu eroarea; proportionalitatea se mentine numai in banda de proportionalitate
Reglajul proporţional-integral – regulator de tip PI • comanda depinde de abaterea momentana si de integrala abaterii – efect de filtrare c(t) = Kp( ε(t) + 1/Ti ∫ ε(t)dt ) unde Ti – constanta integrativa • caracteristici: • reglaj mai bun decat cel de tip P • elimina zgomotele care apar pe valoarea masurata • daca Ti este prea mic sistemul intra in oscilatie
Reglajul proporţional-derivativ – regulator PD • comanda depinde de abaterea momentata si de derivata abaterii c(t) = Kp( ε(t) + Td dε(t)/dt ) unde: Td – factorul derivativ • caracteristici: • folosit pentru procese lente in vederea detectarii directiei si vitezei de variatie a abaterii • daca Td este mare sistemul intra in oscilatie, mai usor decat in cazul precedent dε(t)/dt = dVM(t)/dt
Reglajul proporţional-integral-derivativ – regulator de tip PID • comanda depinde de valoarea momentana, integrala si derivata abaterii c(t) = Kp( ε(t) + 1/Ti ∫ ε(t)dt +Td dε(t)/dt) • cu factor de corelatie: c(t) = Kp( (1+q*Td/Ti)*ε(t) + 1/Ti ∫ ε(t)dt - Td dVM(t)/dt) unde: (1+q*Td/Ti) – factor de corelaţie q – constanta de corelaţie (dependentă de construcţia regulatorului)
Regulator PID • caracteristici: • performantele cele mai bune in categoria de regulatoare continue • coeficientii regulatorului PID, Kp, Ti, Td trebuie “acordati” in conformitate cu comportamentul sistemului controlat (pe baza raspunsului la treapta unitara) • daca reglajul nu este adecvat sistemul poate sa intre in oscilatie • acordarea se face pe baza unor criterii de optimalitate: • abaterea minima • integrala patratului abaterii sa fie minima • timp minim de atingere a valorii prezcrise • abaterea maxima sa nu depaseasca o valoare prestabilita
Regulatoare digitale • proceseaza si genereaza semnale digitale • formula de reglaj: c(kT) = Kp [ε(kT) + 1/Ti*Σ ε(jT)*T + Td*(ε(kT) - ε((k-1)T)/T] unde: T – perioada de esantionare c(kT) – comanda la momentul kT ε(kT) – abaterea la momentul kT • formule practice: c(kT) – c((k-1)T)= Kp [ε(kT) – ε((k-1)T) + 1/Ti*ε(kT)*T + Td*(ε(kT) – ε((k-2)T)/T] • dupa regruparea termenilor: c(kT) = c((k-1)T) + A*ε(kT) + B*ε(kT) + C*ε(kT)
d Y VP a b c Răspunsul unui sistem automat de reglaj • Tipuri de raspuns • răspuns aperiodic, care tinde asimptotic către o valoare sub valoarea prescrisă (a) • răspuns aperiodic, care tinde asimptotic către valoarea prescrisă (b) • răspuns periodic amortizat (c) • răspuns periodic neamortizat (d)
εmax VM VP ε(t) Acordarea regulatoarelor • determinarea constantelor Kp, Ti, Td pentru o functionare optimala • nu exista solutie unica, depinde de obiectivul urmarit • Metodele de acordare a regulatoarelor se bazează pe anumite criterii de performanţă, cum ar fi: • criteriul suprafeţei minime pentru graficul abaterii • criteriul suprafeţei minime pentru graficul abaterii pătratice • criteriul suprafeţei minime pentru graficul modulului funcţiei abatere • criteriul minimizării abaterii maxime • criteriul timpului minim de stabilizare
Acordarea regulatoarelor • Varianta 1. (Metoda Ziegler-Nichols) • Se anulează efectul integrativ (Ti = ∞) şi derivativ (Td = 0), iar constanta de proporţionalitate (Kp) se fixează la valoarea minimă. • Se măreşte treptat valoarea lui Kp până când sistemul intră în oscilaţie. • Se măsoară perioada oscilaţiei ( T0) şi se notează valoarea constantei de proporţionalitate pentru care sistemul a intrat în oscilaţie (Kp0). • Conform criteriului suprafeţei minime se aleg următoarele valori pentru constantele regulatorului: pentru regulator P : Kp = 0,5 Kp0 pentru regulator PI: Kp = 0,45 Kp0 ; Ti = 0,8 T0 pentru regulator PID: Kp = 0,6 Kp0 ; Ti = 0,5 T0 ; Td= 0,125 T0
VM Vsat K = (Vsat-V0)/c0 t V0 Tm T c c0 t Acordarea regulatoarelor • Varianta 2. Pentru această variantă trebuie să se determine în prealabil răspunsul sistemului controlat la un semnal de tip treaptă unitară. Din graficul funcţiei răspuns se determină: • constanta de amplificare a sistemului - K - raportul dintre variaţia ieşirii şi variaţia semnalului de intrare • constanta de timp a sistemului - T – timpul estimat de atingere a valorii de saturaţie dacă creşterea ar fi numai liniară (porţiunea dreaptă a graficului) • timpul mort al sistemului – Tm – întârzierea cu care sistemul reacţionează la o variaţie a semnalului de comandă pentru regulator P: Kp = (1/K)*(T/Tm) pentru regulator PI: Kp = 0,8*(1/K)*(T/Tm); Ti = 3 Tm pentru regulator PD:Kp = 1,2*(1/K)*(T/Tm); Td = 0,25 Tm pentru regulator PID: Kp = 1,2*(1/K)*(T/Tm); Ti = 2 Tm; Td =0,45Tm
Calcul parametri Estimator Kp,Ti,Td VP Y c Proces Regulator Regulatoare adaptive • care isi determina automat coeficientii de reglaj • se face periodic o estimare a comportamentului sistemului si se reacordeaza coeficientii de reglaj • se secomanda pentru sistemele care isi modifica comportamentul in timp
Criterii de alegere a tipului optim de regulator • Alegerea soluţiei optime de reglaj se face pe baza mai multor criterii: • după valoarea raportului dintre timpul mort şi constanta de timp a procesului: ( 0 .. 0,3) - regulator bipoziţional Tm/T = (0,3 .. 1) – regulator PID > 1 – regulatoare speciale (ex.: regulatoare adaptive) • după caracteristicile procesului şi ale perturbaţiilor: • cu o constantă de timp dominantă – regulator P • cu două constante de timp dominante – regulator PI, PID • cu zgomot mare – regulator PI • cu zgomot redus şi constantă de amplificare mică – regulator PD • pe baza experienţei acumulate: • reglaj de nivel – regulator P, PI • reglaj de debit - PI • reglaj de temperatură, presiune: P, PI, PID