Download
1 / 34
340 likes | 508 Views
This study introduces an innovative approach to learn the parameters of Linear Dynamical Systems (LDS) while ensuring the stability of the dynamics matrix. By formulating the problem as a semi-definite program (SDP) and starting with a quadratic program (QP) relaxation, we can iteratively add constraints, achieving stability early in the process. Our method demonstrates improved efficiency and accuracy in modeling dynamic textures, highlighting its relevance in video synthesis, recognition, and compression. Empirical results validate the performance of our algorithm compared to previous methods.

E N D
A Constraint Generation Approach to Learning Stable Linear Dynamical Systems Sajid M. SiddiqiByron BootsGeoffrey J. Gordon Carnegie Mellon University NIPS 2007poster W22
Objective • Learn parameters of a Linear Dynamical System from data while ensuring a stable dynamics matrix Amore efficiently and accurately than previous methods
Our Approach • Formulate an approximation of the problem as a semi-definite program (SDP) • Start with a quadratic program (QP)relaxation of this SDP, and incrementally add constraints • Because the SDP is an inner approximation of the problem, we reach stabilityearly, before reaching the feasible set of the SDP • We interpolate the solution to return the best stable matrix possible
Outline • Linear Dynamical Systems • Stability • Convexity • Constraint Generation Algorithm • Empirical Results • Conclusion
Application: Dynamic Textures1 • Videos of moving scenes that exhibit stationarity properties • Can be modeled by a Linear Dynamical System • Learned models can efficiently simulate realistic sequences • Applications: compression, recognition, synthesis of videos • But there is a problem … steam river fountain 1 S. Soatto, D. Doretto and Y. Wu. Dynamic Textures. Proceedings of the ICCV, 2001
Linear Dynamical Systems • Input data sequence • Assume a latent variable that explains the data • Assume a Markov model on the latent variable
Linear Dynamical Systems2 • State and observation updates: • Dynamics matrix: • Observation matrix: 2 Kalman, R. E. (1960). A new approach to linear filtering and prediction problems. Trans.ASME-JBE
Learning Linear Dynamical Systems • Suppose we have an estimated state sequence • Define state reconstruction error as the objective: • We would like to learn such that i.e.
Subspace Identification3 • Subspace ID uses matrix decomposition to estimate the state sequence • Build a Hankel matrixD of stacked observations 3 P.Van Overschee and B. De Moor Subspace Identification for Linear Systems. Kluwer, 1996
Subspace ID with Hankel matrices Stacking multiple observations in D forces latent states to model the future e.g. annual sunspots data with 12-year cycles = k = 12 k = 1 t t First 2 columns of U
Subspace Identification3 • In expectation, the Hankel matrix is inherently low-rank! • Can use SVD to obtain the low-dimensional state sequence For D with k observations per column, = 3 P.Van Overschee and B. De Moor Subspace Identification for Linear Systems. Kluwer, 1996
Training LDS models • Lets train an LDS for steam textures using this algorithm, and simulate a video from it! = [ …] xt2 R40
Simulating from a learned model xt t The model is unstable
Notation • 1 , … , n : eigenvalues of A (|1| > … > |n| ) • 1,…,n: unit-length eigenvectors of A • 1,…,n: singular values of A (1 > 2 > … n) • S : matrices with |1| · 1 • S : matrices with1 · 1
Stability • a matrix A is stable if |1|· 1, i.e. if • Why? matrix of eigenvectors eigenvalues in decreasing order of magnitude
Stability • We would like to solve xt(1), xt(2) |1| = 0.3 xt(1), xt(2) |1| = 1.295 s.t.
Stability and Convexity • The state space of a stable LDS lies inside some ellipse • The set of matrices that map a particular ellipse into itself (and hence are stable) is convex • If we knew in advance which ellipse contains our state space, finding A would be a convex problem. But we don’t • …and the set of all stable matrices is non-convex ? ? ?
Stability and Convexity • So, S is non-convex! • Lets look at S instead … • S is convex • S µS • Previous work4exploits these properties to learn a stable A bysolving an SDP for the problem: A1 A2 s.t. 4 S. L. Lacy and D. S. Bernstein. Subspace identification with guaranteed stability using constrained optimization. In Proc. of the ACC (2002), IEEE Trans. Automatic Control (2003)
Simulating from a Lacy-Bernstein stable texture model xt t Model is over-constrained.Can we do better?
Our Approach • Formulate the S approximation of the problem as a semi-definite program (SDP) • Start with a quadratic program (QP)relaxation of this SDP, and incrementally add constraints • Because the SDP is an inner approximation of the problem, we reach stabilityearly, before reaching the feasible set of the SDP • We interpolate the solution to return the best stable matrix possible
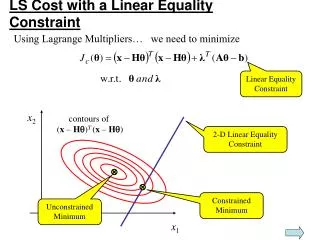
The Algorithm objective function contours • A1: unconstrained QP solution (least squares estimate) • A2:QP solution after 1 constraint (happens to be stable) • Afinal:Interpolation of stable solution with the last one • Aprevious method:Lacy Bernstein (2002)
Quadratic Program Formulation Constraints are of the form
Simulating from a Constraint Generation stable texture model xt t Model captures more dynamics and is still stable
Empirical Evaluation • Algorithms: • Constraint Generation – CG (our method) • Lacy and Bernstein (2002) –LB-1 • finds a 1· 1 solution • Lacy and Bernstein (2003)–LB-2 • solves a similar problem in a transformed space • Data sets • Dynamic textures • Biosurveillance
Reconstruction error • Steam video % decrease in objective (lower is better) number of latent dimensions
Running time • Steam video Running time (s) number of latent dimensions
Reconstruction error • Fountain video % decrease in objective (lower is better) number of latent dimensions
Running time • Fountain video Running time (s) number of latent dimensions
Conclusion • A novel constraint generation algorithm for learning stable linear dynamical systems • SDP relaxation enables us to optimize over a larger set of matrices while being more efficient • Future work: • Adding stability constraints to EM • Stable models for more structured dynamic textures