Download
1 / 11
110 likes | 128 Views
This lab focuses on the principles of pulse width modulation (PWM) and its application in controlling DC motors. It covers topics such as duty cycle, maximum current estimation, incompatible motors, motor characteristics, and motor performance plots.

E N D
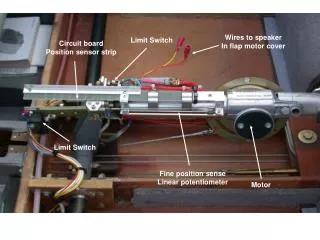
Motor Dynamics Lab 2 Spring Quarter
Pulse Width Modulation • Pulse Width Modulation (or “PWM”) is the manner by which most of today’s DC motors are controlled • Rather than varying the voltage supplied to the motor to control the speed (or power level), the voltage to the motor is simply switched on and off at a very high rate • This rate is expressed as the “Duty Cycle” or the ratio of “on-time” versus “off-time” • Example: a motor with a 50% Duty Cycle is only on half of the time, and therefore only runs with 50% of the power Spring Quarter
The Handyboard • Designed for motors operating at: • 9.6 V • 1 A (maximum current) Spring Quarter
When does Max Current Occur ? • A motor will typically draw the maximum amount of current when it is stalled (i.e. not turning or stopped) • This current is known as the “stall current” • A large spike in current (approaching the level of the stall current) will also occur whenever a motor is started Spring Quarter
How to Estimate Max Current • Measure the motor’s internal resistance using a multi-meter • Set the multi-meter to its most sensitive scale (typically 0 to 200 Ω) • Apply the probes to the motor terminals and gently rotate the motor shaft by hand until the smallest possible reading is obtained Spring Quarter
How to Estimate Max Current • Apply Ohm’s Law ( V=IR ) to find the current draw based on a voltage of 9.6V • A reading of 9Ω would mean a 1A draw (the maximum the Handyboard can deliver) Spring Quarter
Incompatible Motors • Typically the Handyboard will not run properly with: • 3V-4.5V toy car motors • They are too electrically noisy and may draw several amps of current • High end radio controlled car motors • They draw large amounts of power and require 25, 50 or more starting amps • Drawing too much current from the Handyboard will lead to a board reset or possibly a lot worse Spring Quarter
Motor Characteristics • The output properties of primary interest for a DC motor are shaft torque and speed • Typically these quantities are represented as a plot of Torque vs. Speed • The type of DC motors commonly used in this lab will exhibit an operating characteristic known as “negative speed regulation” – which just means that the motor’s speed decreases as the load connected to its shaft increases Spring Quarter
Motor Performance Plots • The maximum speed with no load attached is called the “no-load” speed (nr) • The load that stalls the motor is called the “stall torque” (also the starting torque) Spring Quarter
Lab Guidelines • BE SURE TO PRINT OFF EXTRA COPIES (one per team) OF YOUR TABLE AND TORQUE vs. SPEED GRAPH • Lab Report Guidelines: • Due one week after lab • Individual lab reports • Five pages maximum (including cover page, sketches, attachments) • See Lab Write-Up for more specific instructions Spring Quarter
Questions ? Spring Quarter