Advanced Probabilistic Object Localization Using Tactile Perception in Robotics
10 likes | 116 Views
This study focuses on enhancing robotic manipulation in unstructured environments through effective object localization using a probabilistic approach based on tactile perception. We propose an optimized method for 6 DoF localization that handles uncertainties and improves efficiency in high-dimensional spaces. Our results show significant success in real-time tasks, such as locating and grasping objects autonomously. By utilizing innovative sampling techniques, we reduce computation times drastically, making this method ideal for practical robotic applications in home and office settings.

Advanced Probabilistic Object Localization Using Tactile Perception in Robotics
E N D
Presentation Transcript
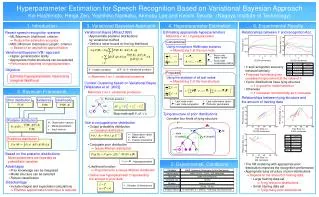
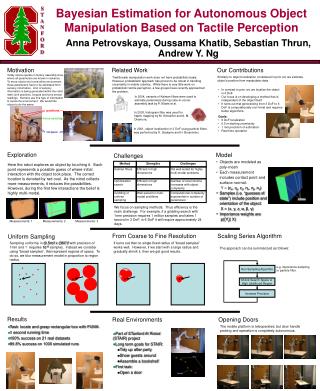
S T A N F O R D Method Strengths Challenges Kalman filters Gridding or uniform sampling Optimization search Efficient in high dimensions Well suited for multi-modal problems Efficient in high dimensions Computational complexity exponential in number of parameters Number of local minima increases with object complexity Not well suited for highly multi-modal problems Bayesian Estimation for Autonomous Object Manipulation Based on Tactile Perception Motivation Related Work Our Contributions Today robots operate in factory assembly lines, where all parameters are known in advance. To move robots into home/office environment these parameters have to be estimated from sensory information. A lot of sensory information is being generated within the robot itself: joint positions, torques and force sensor readings. Humans use this type of information to sense the environment. We would like robots to do the same. Similarly to object localization considered in prior art, we estimate object’s position from manipulator data. Traditionally manipulation work does not have probabilistic basis. However, probabilistic approach has proven to be robust in handling uncertainty in mobile robotics. While there is very little work on probabilistic tactile perception, a few groups have recently approached the problem. • In contrast to prior art, we localize the object in 6 DoF. • Our focus is on developing a method that is independent of the object itself. • It turns out that generalizing from 3 DoF to 6 DoF is computationally non-trivial and requires better algorithms. In 2004, variants of Kalman filters were used to estimate parameters during cube-in-corner assembly task by P. Slaets et al. positions In 2003, histogram filter was used for haptic mapping by M. Schaeffer and A. M. Okamura. • Goals: • 6 DoF localization • 0.5 m starting uncertainty • 1 mm precision of estimation • Real time operation force sensing In 2001, object localization in 3 DoF using particle filters was performed by K. Gadeyne and H. Bruyninckx. torques Exploration Model Challenges • Objects are modeled as poly-mesh • Each measurement includes contact point and surface normal: • Y = (cx, cy, cz, nx, ny, nz) • Samples (i.e. “guesses of state”) include position and orientation of the object: • X = (x, y, z, α, β, γ) • Importance weights are • p({Yi}| X) Here the robot explores an object by touching it. Each point represents a possible guess of where initial interaction with the object took place. The correct location is denoted by red oval. As the robot collects more measurements, it reduces the possibilities. However, during the first few interactions the belief is highly multi-modal. We focus on sampling methods. Thus efficiency is the main challenge. For example, if a gridding search with 1mm precision requires 1 million samples and takes 1 second in 3 DoF, in 6 DoF it will require approximately 24 days. Anna Petrovskaya, Oussama Khatib, Sebastian Thrun, Andrew Y. Ng Measurements: 1 Measurements: 2 Measurements: 3 From Coarse to Fine Resolution Scaling Series Algorithm Uniform Sampling Sampling uniformly in (0.5m)3 x (360˚)3 with precision of 1mm and 1˚ requires 1015 samples. Instead we consider using “broad samples”, that represent regions of space. To do so, we blur measurement model in proportion to region radius. It turns out that no single fixed radius of “broad samples” works well. However, if we start with a large radius and gradually shrink it, then we get good results. The approach can be summarized as follows: e.g. importance sampling or particle filter Run Sampling Algorithm Shrink Search Space to High Likelihood Region Increase Precision Results Real Environments Opening Doors • Task: locate and grasp rectangular box with PUMA • 1 second running time • 100% success on 21 real datasets • 99.8% success on 1000 simulated runs The mobile platform is teleoperated, but door handle probing and operation is completely autonomous. • Part of STanford AI Robot (STAIR) project • Long term goals for STAIR: • Tidy up after party • Show guests around • Assemble a bookshelf • First task: • Open a door