Download

1 / 1
10 likes | 238 Views
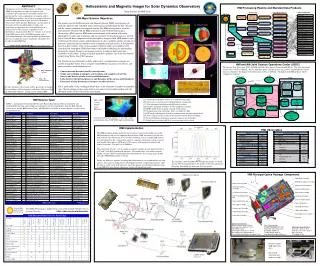
ABSTRACT The HMI instrument was delivered in November 2007 and has been integrated onto the SDO spacecraft with a launch readiness date of December 2008. During the integration and testing of the instrument an extensive series of calibrations were performed.

E N D
ABSTRACT The HMI instrument was delivered in November 2007 and has been integrated onto the SDO spacecraft with a launch readiness date of December 2008. During the integration and testing of the instrument an extensive series of calibrations were performed. Here we describe some of the calibrations performed and show selected results. We will also discuss remaining efforts, such as on-orbit calibrations as well as describe the expected performance of the instrument. Fig. 10: Non-tunable element (Lyot elements) transmission profile averaged over the HMI aperture. This preliminary profile was obtained by using the dye laser at different wavelengths. Fig. 9: Obsmode phase maps and contrast measurements made with the tunable laser. Fig. 4: Flat field for front and side camera. Fig. 13: Temperature dependence of waveplate retardances. Fig. 2: Field dependence of best focus for front (upper panel) and side (lower panel) camera. The linear term (field tilt) has turned out to be difficult to measure consistently, as temporal focus drifts due to temperature changes are indistinguishable from field tilts. However, the focus tilt from side to side is always below one focus step. Fig. 8: Calmode phase maps and line parameters obtained with sunlight. Fig. 7: The optical distortion derived from offset images. Fig. 11: Expected Doppler errors as a function of input velocity for a number of different LOS field strengths. Fig. 3: Image motion for rotating waveplates. Each of the twelve minor ticks represents a 30o rotation of the respective waveplate. SP51B-14 Helioseismic & Magnetic Imager – Calibration and Expected Performance POLARIZATION To measure the polarization properties the PCU (from HAO) is placed between the stimulus telescope and the instrument. The PCU consists of a polarizer followed by a (~ 1/4λ ) waveplate, both on linear and rotary stages allowing them to be moved in and out of the beam and rotated. Using various PCU and internal mechanism settings it is possible to infer the retardance of the telescope and internal waveplates as well as their orientations and a number of other polarization properties. Figure 12 shows an estimate of the repeatability of the polarization calibration. As an illustration of the kind of features we need to take into account in the calibration, Figure 13 shows the temperature dependence of the retardance of the three internal waveplates. The only outstanding issue here is that of temperature induced stress birefringence in the front window. When the window rim is heated up a significant effect is seen. A measurement of a spare window has been made and the effect appears to be due to a center to edge temperature gradient (fairly harmless) rather than a bulk temperature change (more unpleasant). Jesper Schou and the HMI Calibration Team, Stanford University and Other Places IMAGE QUALITY Late in the development the original flight front window was replaced with a spare window that had been polished to take out wavefront errors introduced by internal defects. The MTF with the new window is excellent as shown in Figure 1. The MTF still has to be corrected for the measured aberrations in the stimulus telescope, which have been independently measured. We expect that phase diversity analysis performed on-orbit will be able to constrain the MTF. Similarly the field curvature, as determined by offsetting the pointing of HMI relative to that of the stimulus telescope, is quite acceptable, as illustrated in Figure 2. This measurement will also benefit from being done on orbit. Substantial image motions are consistently seen when wavelength selector waveplates number 2 and 4 are rotated, as illustrated in Figure 3. That the image motion is only vertical (note that there is no corresponding shift in horizontal direction) is hard to explain by waveplate deformation and may indicate that it is related to the test setup, but it has been consistently observed throughout the calibration process. Any residual image motions from this or any other causes will be taken out in the level 1 data processing. The rotation between the cameras is stable around 0.08o The shift shown in the table below varies by a few pixels when the environment of the instrument (e.g. thermal/mechanical stresses) changes and changed by about one pixel after the instrument was shipped (Nov 11) and integrated into SDO, presumably due to gravity effects or a different temperature. We have determined the flat fields by offpointing HMI relative to the stimulus telescope. Results are shown in Figures 4 and 5. The most prominent large-scale flat field feature is the different gains of the four quadrants and the vignetting towards the edge of the field. (The vignetting radius is always larger than the radius of the Sun.) On small scales, we see bubble-like structures which are traces of dust in the optics, and finger-like structures which are only visible when the CCD is cold. We suspect that this is due to condensation on the CCD. As can be seen from Figure 6 the image scale is very close to the desired 0.5"/pixel. Figure 7 shows a distortion map derived by offpointing the instrument relative to the stimulus telescope using the alignment legs. While the distortions are significant in some places, this is easily correctable since the images will be remapped as part of the ground processing. Wavelength & Filter Transmission Another critical area is to determine the wavelength response. This is done using sunlight, a tunable laser and white light. Selected results are shown in Figures 8-11. The phase maps and contrasts are excellent and should not cause significant degradation of the quality of the calibrated data. Among the interesting features seen are the weak fringes in the front window seen in calmode. The transmission profile in Figure 10 as well as the Doppler performance in Figure 11 are excellent. • HMI calibration activities were divided into two main phases: • In-air calibration • Some calibrations can only be performed in air. In particular the measurement of the telescope polarization would be compromised by the presence of the vacuum tank window, as might aspects of the image quality. • Vacuum calibration: • Most calibrations were repeated with the instrument in a vacuum tank, resulting in a dramatically lower noise level. • In both cases light can either come from a heliostat or from a • stimulus telescope. The latter is able to project known images into • the instrument or use laser light to calibrate the wavelength dependence. • In addition a Polarization Calibration Unit (PCU), described later, can • be inserted in the beam in front of the instrument. • Once on orbit a comprehensive set of calibrations will be run as soon • as the instrument is operational followed by periodic measurements • of a variety of properties. • In the following sections a few of the results of the calibrations will be shown ordered by subject: • Image quality • Filter transmission • Polarization • Miscellaneous. • The latter covers items such as CCD/camera performance, contamination, thermal effects, ISS performance etc. Fig. 12: The error in an observation based on the average of several calibrations demodulated by the results of one of them. The requirement is 1% Miscellaneous In addition to the calibration topics listed in the previous sections, several other properties have been or will be measured. These include items such as properties of the CCDs and cameras, checking for ghost images and contamination, thermal effects, ISS performance and alignment leg repeatability. Finally it is possible to obtain real observing sequences and to calculate observables. However, due to the poor seeing, limitations of the instrument, lack of solar activity and the weather during the first Sun test few of these were taken. For entertainment “first light” Doppler and line-of-sight magnetograms are shown in Figure 14. On-Orbit Calibrations In addition to the calibrations described in the previous sections we will also be performing various calibrations on-orbit. Some of these, such as final focus, focus gradients and parts of the polarization are best done in space. Others, such as the focus, Michelson drifts and flat field changes, will have to be tracked during the mission. The on board calibrations will be performed on a variety of time-scales. Flat fields, in particular bad pixels, will be continuously monitored using the regular images. Other items, like calmode images, full line scans and detunes for wavelength calibrations may happen on a daily or weekly basis. Finally some items require significant disruptions to the observing sequence or have other constraints. This includes items such as spacecraft offpoints to make flatfields and observations of eclipses and transits to determine the absolute roll angle. Camera Shift Table Date Δx Δy Date Δx Δy Feb 18 -6.6 5.5 Nov 03 -6.1 4.3 Feb 14 -6.4 5.7 Nov 02 -6.4 4.2 Jan 30 -6.2 5.3 Oct 28 -6.7 3.5 Fig. 1: The MTF as measured with the help of the Stimulus telescope. The plot shows the theoretical MTF of the combined HMI and Stimulus telescope (dashed line), and the actual MTF of this system for front and side camera at best focus. The MTF for each camera is represented by two lines representing the best and worst azimuths. The difference of the two lines represents the residual astigmatism. The Strehl ratio is 0.79 and 0.81 for front and side camera, respectively. Fig. 14: First light (almost) Doppler and line of sight magnetograms obtained with HMI. Acknowledgements: The first author is grateful to the large number of people who have helped build HMI or worked on the calibrations. The HMI calibration team members include Sebastien Couvidat, Cristina Rabello-Soares, Richard Wachter, Tom Duvall, Juan Manuel Borrero and Jesper Schou. Other people providing significant help include: Steve Tomczyk, Aimee Norton, David Elmore, Greg Card, Jack Harvey, Phil Scherrer, Jim Aloise, Jeneen Sommers, Todd Hoeksema, Keh-Cheng Chu, Hao Thai, Karen Tian, Rock Bush, Yang Liu, Rick Bogart, Ted Tarbell, Dick Shine, Barbara Fischer, Brett Allard, Brett Pugh, Carl Yanari, Claude Kam, Dave Kirkpatrick, Dave Sabolish, Gary Linford, Gil Mendelilla, Glenn Gradwohl, Hank Hancock, Jerry Drake, John Miles, JP Riley, Keith Mitchell, Louis Tavarez, Roger Chevalier, Ron Baraze, Rose Navarro, Tom Cruz, Tom Nichols and Tracy Niles. Details about HMI can be found at http://hmi.stanford.edu The HMI project is supported by the National Aeronautics and Space Administration under contract NAS5-02139 to Stanford University. Conclusion We have by now calibrated all parts of the assembled instrument. As far as we can tell the performance is excellent. However, we still have to complete some of the detailed calculations and write the code needed to apply the calibrations to the data. Fig. 5: Highpass-filtered flatfield of the front camera. The circular structures are caused by contamination of the optics. The horizontal ``finger'' in the upper right quadrant is likely caused by condensation when the CCD is cold. Fig 6: The image scale as a function of focus position has been measured by evaluating the radius of the solar disk. Note that atmospheric perturbations introduce noise in the measurements.