
具仿生氣控承筒之肌電刺激式膝上義肢雛型設計開發
Hamstrings muscle with pads. 具仿生氣控承筒之肌電刺激式膝上義肢雛型設計開發. 空氣出. 空氣出. 研究摘要. 空氣入. 空氣入. 空氣入.

具仿生氣控承筒之肌電刺激式膝上義肢雛型設計開發
E N D
Presentation Transcript
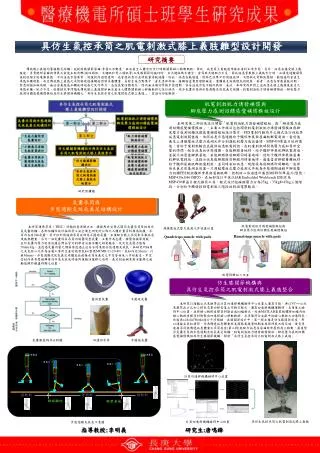
Hamstrings muscle with pads 具仿生氣控承筒之肌電刺激式膝上義肢雛型設計開發 空氣出 空氣出 研究摘要 空氣入 空氣入 空氣入 傳統膝上義肢均屬被動式結構,能提供膝關節屈曲-背屈之活動度,無法產生人體自然步行時膝關節瞬心移動軌跡,因此,病患穿上義肢後常無法達到正常步態。另外,病患在接受膝上截肢後,負責腿部屈曲與伸展之前後主肌肉群(股四頭肌、半腱肌和骨二頭肌等)以及膝關節均被切除,且大腿組織不健全,會導致大腿肌力不足,因此病患穿戴膝上義肢步行時,必須透過髖關節屈肌收縮才能甩動義肢,不但造成步態異常、殘肢肌肉過度使用,也會使病患行走時能量消耗過量。除此,病患在截肢後,因淋巴液集中於殘肢底部,又因缺乏骨骼肌壓縮,截肢後均會產生殘肢水腫現象,而且傳統膝上義肢之承筒與殘肢接觸面因須承載體重,易發生施力點集中,產生患部疼痛、接觸面皮膚因磨擦破皮、潰爛甚至組織壞死的現象。再者,病患在穿戴義肢初期,因患側猶如踩高蹺,無法由義肢感知觸地時地面之反作用力,造成感覺回饋喪失,因而無法確切掌握步態週期,容易造成步態不穩而跌倒。爰此,本研究係針對上述病患在膝上截肢後產生之殘肢水腫、肌力不足、感覺缺失等問題及傳統膝上義肢關節無法產生人體膝關節瞬心移動軌跡之設計缺失,結合氣囊承筒與步態週期充放氣義足結構、肌電刺激肌力誘發補償模組、腳底壓力感測回饋感覺補償模組及仿生膝關節機構之「具仿生氣控承筒之肌電刺激式膝上義肢」,並進行功能驗證。 著地期 擺動期 擺動期 腳跟離地 腳跟著地 肌電刺激肌力誘發補償與 腳底壓力感測回饋感覺補償模組設計 本研究第二部份為設計開發「肌電刺激肌力誘發補償模組」與「腳底壓力感測回饋感覺補償模組」,主要工作項目包括開發肌電刺激肌力誘發補償模組與腳底壓力感測回饋訊號感覺補償模組設計製作,FES電刺作動時序之程式設計係校準病患電刺激閥值後,依照病患步態週期給予髖部伸展與屈曲肌群電刺激,當前後義足上薄膜壓組式壓力感測元件分別接收到壓力感設值時,MSP430單晶片經判讀後,會給予電刺激輸出並提供病患肌電刺激;在肌電刺激時間為壓力感知器所受壓的時間,配合病患的步態週期。在後腳跟著地時,給予髖部伸展肌群肌電刺激,並提示病患後腳跟著地,若後腳跟與前腳跟同時著地時,則給予髖部伸展與屈曲肌群肌電刺激,並提示病患後腳跟與前腳跟同時著地時,最後當前腳跟要離地時,給予髖部屈曲肌群肌電刺激,並同時告知病患,現階段為前腳跟即將離地,底部係在義足前後測各放置一只薄膜壓組式壓力感測元件做為步態週期過程中腳底壓力回饋FES刺激髖部伸展與屈曲肌群,控制核心係由德州儀器MSP430單晶片(型號:MSP430xG4618IPZ),在細部設計中係以IAR Embedded Workbench IDE作為MSP430單晶片程式撰寫工具,程式設計把踩踏壓力分為25kg、35kg和45kg三個階段,分別給予觸發控制電刺激三階段的刺激電壓輸出。 研究架構圖 氣囊承筒與 步態週期充放氣義足結構設計 Quadriceps muscle with pads 肌電刺激肌力誘發補償模組與 腳底壓力感測回饋感覺補償模組 本研究運用萃思(TRIZ)問題創意思解方法,擇採用非交替式圓筒氣囊承筒來做為充氣氣囊結構;各部位構件設計採用勞工安全衛生研究所公佈之人體計量資料庫為依據,承筒內各有2組氣囊,其中位於殘肢與承筒底部為半圓球氣囊,主要配合膝上承筒來承載病患殘肢與體重,另外一組氣囊係在承筒內側圓筒型氣囊,主要作為包覆、擠壓與按摩殘肢,至於氣囊內壓力則係依據台灣血管外科學會治療水腫之研究報告,設定充氣壓力值為50mm-Hg。並透過氣囊內壓之調節係透過止逆安全閥來配合態週期充放氣。本研究所採用之充氣核心元件為金屬工業所生產的微型氣缸(型號MCMB-11-20-80):氣缸內徑32mm,行程80mm)。步態週期充放氣義足結構包括連接承筒及義足之中空管材及八字形義足。中空管材內具有壓縮彈簧別作為充放氣時使用推動活塞桿之功用,義足則由鋼索與活塞桿之連動復歸於擺盪時期之位置。 薄膜壓組式壓力感測元件放置位置 肌電刺機貼片位置 仿生膝關節機構與 具仿生氣控承筒之肌電刺激式膝上義肢整合 圓筒型氣囊 半圓球氣囊 本研究以海龍公式來推導出計算四連桿機構瞬時中心位置之運算方程,再以VC++公式來撰寫出以已知三桿長求第四桿長度之作動方程式,運算四連桿機構運轉時,各角度之瞬時中心位置,並將瞬心軌跡座標資料匯出成txt檔格式,經由MATLAB套裝軟體將txt檔內的瞬心軌跡座標資料繪製出四連桿瞬心移動軌跡,求得最符合文獻中的瞬心軌跡之四連桿長,然後再以Solid Works進行干涉模擬,在膝關節設計中,第一桿主要是仿生膝關節底座,用以連接至氣缸頂部,作為傳遞病患體重與支撐膝義肢著地期屈屈與伸展之固定端,使負責連接承筒與傳遞病患體重之承筒底座(第三桿)能配合病患在屈曲與伸展時其上移動,最後整合氣囊承筒與步態週期充放氣義足結構、肌電刺激肌力誘發補償模組、腳底壓力感測回饋感覺補償模組及仿生膝關節機構,開發「具仿生氣控承筒之肌電刺激式膝上義肢」。 四邊形承筒 半圓球氣囊 氣囊動態時序分析圖 計算四連桿機構瞬時中心位置 具仿生氣控承筒之肌電刺激式膝上義肢 計算四連桿機構瞬時中心位置 步態週期充放氣示意圖 指導教授:李明義 研究生:唐鳴鋒