Download
1 / 36
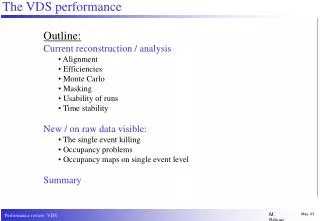
360 likes | 542 Views
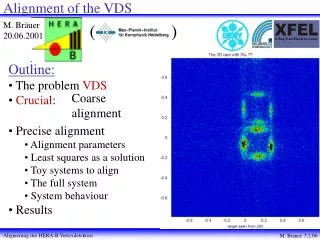
M. Bräuer 20.06.2001. ( ). Alignment of the VDS. Outline: The problem VDS Crucial :. Coarse alignment. Precise alignment Alignment parameters Least squares as a solution Toy systems to align The full system System behaviour Results. Teil I

E N D
M. Bräuer 20.06.2001 ( ) Alignment of the VDS • Outline: • The problem VDS • Crucial: Coarse alignment • Precise alignment • Alignment parameters • Least squares as a solution • Toy systems to align • The full system • System behaviour • Results
Teil I HERA-B Einführung
HERA-B • Vorwärtsspektrometer mit festem Target • Hochraten – Experiment • Anspruchsvolles Triggersystem • ca. 650.000 Kanäle
The problem: VDS 2 m Major Problems: • The bare size • No tracks into VDS existing • Today: Matching without VDS track? • Momentum? • Magnet tracking? • Survey/setup: Needed: <200µm !
Teil II Pre-Tracking Alignment
Coarse alignment: Before tracking beam 1 SL u • Position of pots wrt. to each other unknown • Double modules within a pot not optimal adjusted Assume some module-positions to be known: => Start without tracking !
Coarse alignment: 1st step => Tracking needed => Use full combinatorics for other modules in the two pots (+mild target cut) Assume:2ds module-positions in different SL to be known ! => tracks defined .. but not only tracks.. => 4 ds modules adjusted=> 8 hits/track
Alignment der Systems durch Überlapp Povh (MPI-K): Like Lord Münchhausen got out of the swamp.. Never align a plane included in tracking !
Coarse alignment: The VDS II We have seen better target spots, but this is coarse alignment ! • Searching for signals is the remaining task. • For each plane: Coarse and fine binning • 10 mm 250 µm • - Semi automatic procedure (´asks´ for help) => 4 Quadrants aligned wrt. to each other
Why coarse alignment ? reality reco How can this be? Only tracks from the upper quadrant ! => robust tracking && no coarse Alignment !
Teil III Fein Alignment
Tracking: Spurmodell Wesentlich:
Tracking and alignment • Master formula: relating hits, tracks and geometry pitch p/n strip angle • Known parameters:(assumption!) planes perpendicular wrt. z-axis wafer thickness • Undefined parameters:(now: a guess !) shear in x,y y x move in x,y,z rotate around z z detector scale in z => 7 undefined parameters. => cp. later !
Alignment = Minimisation x X Change the geometry to minimise the residuals between hits and tracks. Coarse alignment: move along the axis in parameter space: Linear least squares: always a good idea? Parameters needed Measurements measured Design Matrix your problem (linear) Covariance matrix of measurements Weight Matrix Residuals
Least Squares Minimisation The principle: Minimise Gives directly the parameter and their covariance matrix => Solve only Ax=b to align the VDS ?? • Yes, but track-parameter and alignment parameter correlate! • 250 Alignment parameter, 20000 tracks (nice fit) • dim(A) = O(80000) ! A x = b GByte Matrix.. ..but quite sparse!
Least Squares Minimisation II Make use of „inversion by partitioning“: • For each track • For the alignment parameter with Ursprung: C. F. Gauß ! Entdeckung in Literatur zur Landes und Erdvermessung, Grundstudium => Thats it! (Numerical Inversion remains..)
Least Squares Minimisation II: Toy Why so complex? explained using a simple toy-problem: reality (unkonwn) Assumption • Only parallel tracks • Quite simple to align but the real missalignment not found !
Less Complex Idea.. Something you know (Mr. X: „First plane is okay“) : Do not touch it: „Therefore you iterate“.. • What about reality ? • What is the least influence wrt. to reality? • - Minimise with LLSQ - Correct treatment of global parameters: „If you can not determine, do not touch !“ Math: .. till eternity!
Undefined parameters I Replace Mr. X by some defined quantity. (I strongly prefere to work with mathematical / operational definitions!) • Common sense on toy problem: • „You can cary your detector around.„ • One global parameter • Moving chamber 1 by x => move chamber 1..n by x Better: (math) The Correlation–matrix has not full rank. (..really numerics comes later ..) Degenerated ellipsoid described by covariance matrix
Undefined parameters: Realität The undefined parameters need not to be guessed! => Singular Value Decomposition ..at least once
Undefined parameters II Blobel: Special, fast system (pivoting) Constraints are applied => Matrices might look nice: Praxis: Matrizen zeigen Überlapp des Detektors in DEN Daten, ohne Diskussion Log. Linear:
Towards the full system Going to reality:Face the non-linear problem Using: Gives to first order: Non-gaussian residuals ! track residuals
Towards the full system unbiased residuals (explicit exclusion!) Achtung Falle: ‚Tracking-Codes‘ können Einfluß eines Treffers ‚herausrechnen‘ Nur wenn alle Verteilungen der Annahme entsprechen! Im Alignment hochgradig falsch / gefährlich ! Nein!
Non Gaussian residuals Robust statistics was not at hand ! The way out : (Later found to be robust) • Extend Iterations • Determine the individual resolution from unbiased residuals • Cut on unbiased residuals Paw fit and robust technique (MAD) Policy: No Minuit calls to non-lin fits in system !
The system Moreover: Hit/track association is alignment dependent! Linear Alignment as one block of a complex system! • Typicals: • Needs 20000 (good) tracks in VDS (1/MB event) • 3 outer iterations: 1.5 h (full reco !) • 2..3 innermost iterations • 4 Quality iterations
Teil IV Tests Ergebnisse
Results of the system I Worst parameter: z of SL 8 => 100 µm with 70000 tracks! Reproduce: (simulated tracks) Residuals: text files.. (precision)
Results of the system II Are the errors from C-Matrix OK? Bootstrap: • Have a set of data • Produce a set of fit-parameters • Draw tracks from input sample in a random manner • Produce new fit parameters • Repeat O(500 times) • Look for RMS of fit parameters of all sets
Results of the system III Does it find artificial shifts? • Align • Move two opposite pots to keep cog. (global) fix! • Align • Plot differences: Tracker cut: 200 µm !
Results of the system IV Artificial shifts: z,α, Wert bzgl. Original nach 1,2,3 Iterationen
Physics I Some nice pictures ..obtained by using an aligned VDS
Physics I Some nice pictures ..obtained by using an aligned VDS ~30 Alignments in but only one global data set
Alignment Until now: align u, α, z of each (double-) side However: Still : ToDo ! track, slope: tu z First glance: u β≠0 u‘ => Non-linear-tracking !