Search Function
Search Function. Function. System Example. Search function is the function that the robot is stopped by the input signal while it is moving to a specified position. Using this function the robot can perform next motion after the signals come in.

Search Function
E N D
Presentation Transcript
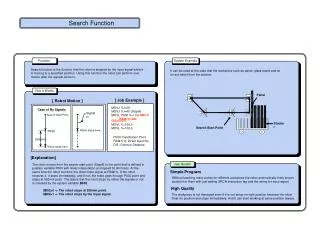
Search Function Function System Example Search function is the function that the robot is stopped by the input signal while it is moving to a specified position. Using this function the robot can perform next motion after the signals come in. It can be used at the case that the workpiece such as panel, glass board and so on are taken from the stocker. How It Works Panel [ Job Example ] [ Robot Motion ] MOVJ VJ=40 MOVJ VJ=40 (StepA) MOVL P000 V=10.0 SRCH RIN#(1)=ON DIS=500.0 MOVL V=100.0 MOVL V=100.0 Case of No Signals Signal In Search Start Point Stocker Search Start Point Robot stops here. P000 P000: Destination Point RIN#1(1): Direct Input No. DIS: Overrun Distance 500mm Robot stops here. [Explanation] User Benefit The robot moves from the search start point (StepA) to the point that is defined in position variable P000 with linear interpolation and speed 10.0mm/sec. At the same time the robot monitors the direct input signal at RIN#(1). If the robot receives it, it stops immediately, and if not, the robot goes through P000 point and stops at 500mm point. The status that the robot stops by either the signals or not is checked by the system variable $B02. Simple Program Without teaching many points for different workpiece the robot automatically finds proper position for them with just adding SRCH instruction tag and the wiring for input signal. High Quality $B02=0 -> The robot stops at 500mm point. $B02=1 -> The robot stops by the input signal. The workpiece is not damaged even if it is not setup on right position because the robot finds it’s position and stops immediately. And it can start working at same position always.
High Speed Starting Point Detecting Function Function Starting Point Calculation The starting point detecting function searches for the path to be welded. This function is helpful to find the path regardless of workpiece size dispersion and workpiece setting position error. Web Surface(Actual) Web Surface(Taught) At the right figure, starting point S’ is calculated with Flange Surface Position Error:H Web Surface Position Error: L Flange Surface (Taught) Detecting Example S 1. Starting Point Detection S’ By touching the wall with motion 1 and 3 the robot calculates the point 5 and moves there. 3 Flange Surface (Actual) 1 4 2. Fillet Point Detection 5 2 Flange Surface Position Error: H (Difference between the taught and actual positions) Web Surface Position Error: L (Difference between the taught and actual positions) As the motion 3, 5 the robot repeats touching until it can not find the wall. When it is found, the robot recognizes that the fillet point is found. 3 1 4 5 2 6 9 7 11 User Benefit 10 8 12 High Quality 3. End Face detection Even if the workpiece is setting up with some gaps against original position, stating point of welding is found automatically. Therefore welding quality is stable and high. By touching the wall with motion 1, 3 and 5 the robot calculates the point 7 and moves there. 1 4 Shorten Cycle Time 5 3 Others 6 The cycle time can be shorten compared with standard starting point detection function because searching speed is faster. 7 There are also detections of the center point of inside circle, outside circle etc. 2 Standard: 0.8m/min High Speed: 4.5m/min