Energy Tracking & Storage for an Autonomous System
220 likes | 403 Views
Energy Tracking & Storage for an Autonomous System . OASIS Mir Ziyad Ali Liron Kopinsky Christopher Wallace Sarah Whildin Joseph Yadgar. Overview. We are building an energy tracking system that will position solar panels in order to get maximum power. Examples 1. Mars Rover

Energy Tracking & Storage for an Autonomous System
E N D
Presentation Transcript
Energy Tracking & Storage for an Autonomous System OASIS Mir Ziyad Ali Liron Kopinsky Christopher Wallace Sarah Whildin Joseph Yadgar
Overview • We are building an energy tracking system that will position solar panels in order to get maximum power. • Examples 1. Mars Rover 2. Hubble Telescope 3. International Space Station 4. Solar-Powered Homes
Main Objectives • Position the Solar Panels so that they will acquire maximum energy from a light source. • Store the acquired energy into batteries, and use the batteries to control the rest of the system when the solar energy is absent. • In no-light or low-light conditions design the system to go into sleep mode so that energy is not wasted. • Design a visual display unit to display status information about the system.
Possible Extensions • Controlling the system via a wireless transceiver. • The possibility to reprogram the FPGA from another location. • Equipping the system with a remote manual override for solar panel positioning in the event of a malfunction. • Data acquisition of power readings and solar power distribution to analyze light patterns .
Risks and Contingencies • Insufficient power is collected from the light source to operate the control system. • Implement low-light intensity control system (power-save mode). • Cost of high-efficiency solar panels is too high. • Use smaller sized solar panels.
Division of Labor • Mir Ziyad Ali: Battery Charging and Power Management • Liron Kopinsky: FPGA hardware design/software • Chris Wallace: FPGA hardware design/software • Sarah Whildin: Solar panel movement and control • Joseph Yadgar: Digital to Analog Component Integration
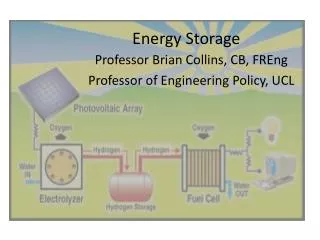
Power Management Objectives: Design a High Efficient Power Source for the entire ETSAS digital System. Solar Energy will be converted to DC Voltage, which will be regulated and supplied for the Microcontroller.
SOLAR PANELS CHARGE CONTROLLER DEEP CYCLE BATT MICROCONTROLLER Power System
Solar Panels • Siemens ST Series multiple-layer CIS solar cells with 12V Output. • Solar panels will be directed at solar south in the northern hemisphere. • Boulder, CO has 5.72 solar insulation in kilowatt-hours per square meter per day. • Three Solar panels will be connected in series to produce 60 Watts (17.1V x 3.5 A) of total power.
Charge Controller/Regulator • A charge controller monitors the battery's state-of-charge to insure that when the battery needs charge-current it gets it, and also insures the battery is not over-charged. • This controller will use the charging principal called the Maximum Power Point Tracking (MPPT) which maximizes the amount of current going into the battery from the solar array by lowering the panel's output voltage.
Deep Cycle Battery • The Deep Cycle batteries will be used as they are designed to be discharged and then re-charged for thousands of times. • Sealed no-maintenance versions Lead-Acid Ah batteries are the most common in PV (Photo Voltaic) systems because their initial cost is lower.
Movement Design • We will use two motors: - 360 degree horizontal motion - approximately 270 degree vertical motion
Stepper Motors - use an electromagnet to rotate the rotor a certain number of degrees. Hybrid unipolar stepper motors will allow for high torque and step rates. Steps will be 1.8° apart so that 200 steps makes a complete rotation. Motors
Motor Control System • Converts signals from the microprocessor detailing direction and step length and converts them to motion on the motor. • Purchase vs. Build
Hardware • Digilent Spartan-3 Board • 1MB onboad SRAM • 2Mb Platform Flash • Switches and Pushbuttons for Manual Control of Solar Panels and LCD contents. • Xilinx Spartan3 XC3S200-FT256 • Small LCD for status information • Miscellaneous • Level Shifters • A/D converters for Solar Panel energy readings and battery level • 4 layer PCB • Other stuff we haven’t found out we need.
Inside the FPGA • Microblaze 32-bit Microprocessor (~50% FPGA) • 50MHz Max on Digilent Board (~40 DMips) • 27K Internal BRAM for used with OPB BRAM controller core • JTAG_UART IP core + Xilinx Microprocessor Debugger + GDB debugger (allows software debugging capabilities) • Undetermined amount of GPIO ports for interfacing with the rest of the system. • OPB Interrupt Controller for use with timers • Any custom logic such as decode logic to communicate with LCD if it is memory-mapped, etc.
Tracking algorithm • Considered using a basic search algorithm • Instead decided to use multiple solar panels and to take differentiation readings • This will allow for us to detect in which direction/s the light intensity is stronger
Tracking continued • Unfortunately, our search algorithm fails if the only light is directly behind the panels • To fix this problem, we intend to put three small stationary panels around the base of the module • We will then use a triangulation algorithm to determine in which direction the light source is
Logic implementation • Using the Xilinx Embedded Development Kit (EDK) we intend to program most of our logic using C/C++ • Additional code optimizations necessary will then be programmed in assembly if necessary • Additional logic necessary on the FPGA (e.g. for data retrieval) will be programmed in Verilog
Advantages Over Existing Systems • By providing a small, modular design, we provide for many different panel configurations not allowed on larger-scale designs • By remaining small, our system should be much more power efficient than larger moving solar arrays • By allowing for system re-programmability, we ensure that our system will be able to be optimized further with, for example, new weather data