Download
1 / 1
10 likes | 159 Views
Figure 3. Spinner Disc Fertilizer Spreader with Baffle plates. Figure 1. Schematic of the subsystems comprising the AVRA. Figure 2. Functions to be performed by the AVRA. Automation Concepts for the Variable Rate Fertilizer Applicator for Citrus S. Cugati 1 , W. Miller 2 , J. Schueller 1

E N D
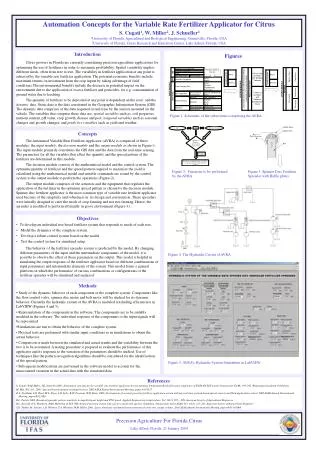
Figure 3. Spinner Disc Fertilizer Spreader with Baffle plates Figure 1. Schematic of the subsystems comprising the AVRA Figure 2. Functions to be performed by the AVRA Automation Concepts for the Variable Rate Fertilizer Applicator for Citrus S. Cugati1, W. Miller2, J. Schueller1 1University of Florida, Agricultural and Biological Engineering, Gainesville, Florida, USA 2University of Florida, Citrus Research and Education Center, Lake Alfred, Florida, USA Introduction Citrus growers in Florida are currently considering precision agriculture applications for optimising the use of fertilizers in order to maximize profitability. Spatial variability implies different needs, often from tree to tree. The variability in fertilizer application at any point is achieved by the variable rate fertilizer application. The potential economic benefits include maximum returns on investment from the crop inputs by taking advantage of field conditions.The environmental benefits include the decrease in potential impact on the environment due to the application of excess fertilizer and pesticides, for e.g. contamination of ground water due to leaching. The quantity of fertilizer to be deposited at any point is dependent on the static and the dynamic data. Static data is the data constituted in the Geographic Information System (GIS). The dynamic data comprises of the data acquired in real-time by the sensors mounted on the vehicle. The variables that comprise these data are: spatial variables such as, soil properties, nutrient content, pH value, crop growth, disease and pest; temporal variables such as seasonal changes and growth changes; and predictive variables such as yield and weather. Figures Concepts The Automated Variable Rate Fertilizer Applicator (AVRA) is comprised of three modules: the input module, the decision module and the output module as shown in Figure-1. The input module primarily constitutes the GIS data and the data from the real-time sensing. The parameters for all the variables that affect the quantity and the spread pattern of the fertilizer are determined in this module. The decision module consists of the mathematical model and the control system. The optimum quantity of fertilizer and the spread pattern required to maximize the yield is calculated using the mathematical model and suitable commands are issued by the control system to the output module to perform the operations (Figure-2). The output module comprises of the actuators and the equipment that regulates the application of the fertilizer in the optimum spread pattern as chosen by the decision module. Spinner disc fertilizer applicator is the most common type of variable rate fertilizer applicator used because of the simplicity and robustness in its design and construction. These spreaders were initially designed to cater the needs of crop farming and not tree farming. Hence, the spreader is modified to perform efficiently in grove environment (Figure-3). • Objectives • To develop an individual tree based fertilizer system that responds to needs of each tree. • Model the dynamics of the complete system. • Develop a robust control system based on the model. • Test the control system for simulated setup. • The behavior of the fertilizer spreader system is predicted by the model. By changing different parameters of the input and the intermediate components of the model, it is possible to observe the effect of these parameters on the output. This model is helpful in simulating the output response of the fertilizer applicator based on different combinations of input parameters and intermediate elements of the system. This model forms a general platform on which the performance of various combinations or configurations of the fertilizer spreader will be simulated and analyzed. Figure 4. The Hydraulic Circuit of AVRA • Methods • Study of the dynamic behavior of each component of the complete system: Components like the flow control valve, spinner disc motor and belt motor will be studied for its dynamic behavior. Currently the hydraulic system of the AVRA is modeled (excluding efficiencies) in LabVIEW (Figures 4 and 5). • Representation of the components in the software: The components are to be suitably modeled in the software. The individual response of the components to the input signals will be represented. • Simulations are run to obtain the behavior of the complete system. • Physical tests are performed with similar input conditions as in simulations to obtain the actual behavior. • Comparison is made between the simulated and actual results and the variability between the two is to be accounted. A testing procedure is prepared to evaluate the performance of this applicator and its response to the variation of the parameters should be studied. Use of techniques like the pattern recognition algorithms should be considered for the identification of the spread pattern. • Subsequent modifications are performed in the software model to account for the unaccounted variation in the actual data with the simulated data. Figure 5. AVRA’s Hydraulic System Simulation in LabVIEW References S. Cugati, W.M. Miller, J.K. Schueller,2003. Automation concepts for the variable rate fertilizer applicator for tree farming. Programme Book of the joint conference of ECPA-ECPLF, poster abstracts for ECPA: 391-392, Wageningen Academic Publishers M. Min, W.S. Lee. 2003. Spectral-based nitrogen sensing for citrus. 2003 ASAE Annual International Meeting, paper # 031137 D.L. Needham, S.D. Reed, M.L. Stone, J.B. Solie, K.W. Freeman, W.R. Raun. 2002. Development of a robust precision fertilizer application system utilizing real-time, ground-based optical sensors and fluid application control. 2002 ASAE Annual International Meeting, paper # 021180 R.L. Parish. 2002. Broadcast spreader pattern sensitivity to impeller/spout height and PTO speed. Applied Engineering in Agriculture, Vol. 18(3): 297 – 299. American Society of Agricultural Engineers B.L. Steward, D.S. Humburg. 2000. Modeling of SCS-700 chemical injection system with carrier control with sprayer simulation. Transactions of the ASAE, Vol. 43(2): 231-245. American Society of Agricultural Engineers S.D. Tumbo, M. Salyani, J.D. Whitney, T.A. Wheaton, W.M. Miller. 2001. Laser, ultrasonic and manual measurements of citrus tree canopy volume. 2001 ASAE Annual International Meeting, paper # 01-011068 Precision Agriculture For Florida Citrus Lake Alfred, Florida. 21 January 2004