Download
1 / 27
290 likes | 523 Views
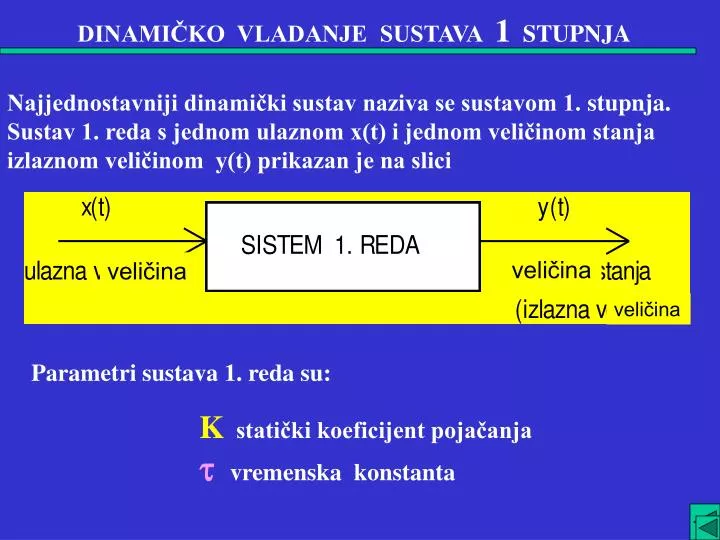
DINAMIČKO VLADANJE SUSTAVA 1 STUPNJA. Najjednostavniji dinamički sustav naziva se sustavom 1. stupnja . Sustav 1. reda s jednom ulaznom x(t) i jednom veličinom stanja izlaznom veličinom y(t) prikazan je na slici. veličina. veličina. veličina. Parametri sustava 1. reda su:.

E N D
DINAMIČKO VLADANJE SUSTAVA 1STUPNJA Najjednostavniji dinamički sustav naziva se sustavom 1. stupnja. Sustav 1. reda s jednom ulaznom x(t) i jednom veličinom stanja izlaznom veličinom y(t) prikazan je na slici veličina veličina veličina Parametri sustava 1. reda su: K statički koeficijent pojačanja vremenska konstanta
Standardna forma matematičkog modela sustava 1. stupnja je diferencijalna jednadžba: Izlazna veličina y(t) je jednoznačno definirana za t > 0 kada je zada-no početno stanje y(t=0) = yo i ulazna veličina x(t) za svako t > 0. Jednadžba je linearna diferencijalna jednadžba prvog reda s konstantnim koeficijentima. Statička karakteristika dobije se kada je derivacija veličine stanja jednaka nuli za konstantnu vrijednost ulazne veličine x(t) = x. Statička karakteristika je je pravac koji prolazi kroz ishodište
Grafički prikaz statičke karakteristike sustava 1. stupnja Brojni su primjeri modela procesa koji se dinamički vladaju kao sustav 1. reda. Također se vrlo često dinamički složeniji procesi aproksimiraju sa sistemom 1. reda. Pokazati ćemo dva jednostavna i značajna primjera procesa koji su sustavi prvog reda, i to za prvi proces je značajan prijenos topline, a u drugom procesu dolazi da istovremenog prijenosa mase i kemijske reakcije.
Primjer A. Primjer B. Promatra se promjena temperature u središtu male metalne kuglice koja se uranja u posudu sa kapljevinom. Kapljevina ima znatno veću masu od kuglice i miješa se tako da tijekom procesa kapljevina ima konstantnu temperaturu. U središtu kuglice mjeri se tempera-tura koja je veličina stanja, odnosno izlazna veličina, y(t) = T(t). Ulazna veličina je temperatura okoliša kuglice, x(t) = To(t), odnosno temperatura kapljevine u posudi. To je primjer kontinuiranog izotermnog reaktora sa kemijskom rekacijom opisanom kinetikom prvog reda. Kapljevina se potpuno miješa tako da je koncentracija u reaktoru svuda ista. Koncentracija reaktanta u reaktoru jednaka je koncentraciji u izlaznom toku i to je veličina stanja, odnosno izlazna veličina, y(t) = cA(t). Ulazna veličina je koncentracija reaktanta u ulaznom toku, x(t) = cA0(t).
Ulazni i izlazni protok kroz reaktor su jednaki i konstantni, tako da je volumen kapljevine, odnosno razina, konstantna tijekom pokusa. Model A. Postavimo bilancu topline za kuglicu volumena V. Promjena akumu-lirane topline u kuglici određena je samo ulaznim tokom topline kroz hidrodinamički granični sloj sa koeficijentom prijenosa h Pretpostavimo da su vrijednosti parametara konstantne i napišemo jednadžbu u obliku jednadžbe sustava 1. reda
Pretpostavimo da su vrijednosti parametara konstantne i napišemo jednadžbu u obliku jednadžbe sustava 1. reda Početno stanje je određeno početnom temperaturom TP , a to je tempera-tura zraka, prije uranjanja kuglice u posudu. Vremenska konstanta i pojačanje su
Model B. Model izvodimo na osnovu bilance mase tvari A u volumenu V reaktora. Do promjene akumulacije mase tvari A dolazi zbog ulaz-nog i izlaznog toka i zbog kemijske reakcije u kojoj je A reaktant. Brzina kemijske reakcije po jedinici volumena za reakciju s kine-tikom prvog stupnja je rA = k cA ( mol l-1 s-1 ) a ukupna brzina se potrošnje A određena je produktom V rA. Bilanca mase glasi: Bilancu možemo pojednostavniti zahvaljujući konstantnim vrijednostima parametara:
Broj parametara se može reducirati ako se upotrijebi omjer protoka i volumena, odnosno ako se uvede brzina razređenja D = q /V. Da se dobije bilanca u standardnoj formi za sistem 1. reda potrebno je jednadžbu podijeliti s koeficijentom uz veličinu stanja cA: Usporedbom vidimo da bilanca mase i jednadžba sustava 1. reda imaju istu formu. Početno stanje je određeno koncentracijom u reaktoru u trenutku t=0. Vremenska konstanta i statički koeficijent pojačanja su: Iz zavisnosti vremeske konstante i pojačanja o parametrima može-mo provesti značajnu diskusiju kako se mijenja tromost i osjetljivost procesa ako se mijenjaju volumen, protok ili temperatura , k=k(T).
Vremenski odziv sustava 1. stupnja Odrediti ćemo promjene izlazne veličine sistema 1. reda za karak-tersitične promjene ulazne veličine prikazane na slici. A-skokomični (stepenasti, Heaviside) impuls , x(t<0)=0 x(t >= 0)=xo B- pravokutni impuls , x(t) = 0 za 0 < t < to , x(t) = h za to < t < to+h x(t) = 0 za t > to + h C- impuls ( beskonačne visine i infinitezimalnog trajanja , Dirac) x(t) = 0 za t 0 i x(to) =
Prvo ćemo odrediti promjenu izlazne veličine sustava 1. reda za skokomičnu promjenu ulazne veličine.U ovom slučaju jednadžba glasi: Jednadžbu rješavamo postupkom " varijacije konstante ". U prvom koraku se riješi homogena jednadžba a u drugom nehomogena uz pretpostavku da je integracijska konstanta funkcija varijable x. Homogena jednadžba glasi: Rješavamo separacijom varijabli i zatim integracijom lijeve i desne strane:
Rezultat integracije je: Ili u obliku: Rezultat je opće rješanje homogene jednadžbe gdje je C integracij-ska konstanta. U slijedećem koraku pretpostavimo da je integracij-ska konstanta funkcija C(t) i pretpostavivši isti oblik rješenja uvrštavamo u nehomogenu jednadžbu:
Deriviramo izraz u uglatoj zagradi Pokratimo drugi i treći izraz i dobijemo diferencijalnu jednadžbu za funkciju C(t) Rješenje je: C0 je integracijska konstanta
Uvrstimo rezultat i dobijemo opći oblik rješenja nehomogene jednadžbe: Integracijsku konstantu odredimo iz početnog uvjeta y(t=0) = yo : Konačno rješenje je:
Rješenje je prijelazni odziv, ili " tranzijentna" promjena, od počet-noga stanja y(0) = yo do uspostavljanja novog stacionarnog stanja y( t = ) = Kx0. Prijelazna promjena je zbroj dviju funkcija: prva je rezultat početnog stanja , a druga je posljedica djelovanja ulazne veličine
Na slici je prikazan prijelazni odziv za slučaj kada je početno stanje sistema nula, yo=0 : Prijelazni odziv sustava 1. reda na skokomičnu promjenu ulazne veličine iznosa x0 i za početno stanje y(0) = 0.
Karakteristične vrijednosti odziva su: Uobičajno je za sustav 1. reda uzeti kao trajanje prijelazne promje-ne do uspostavljanja novog stacionarnog stanja vrijeme od četiri vremenske konstante. Nakon vremena 4 postignuto je 98,2 % vrijednosti stacionarnog stanja Kxo . Grafički prikaz rje[enja odgovara prijelaznoj promjeni koja nastaje u opisanom pokusu sa uranjanjem kuglice u kapljevinu i za pokus sa protočnim reaktorom kada se koncentracija reak-tanta u pritoku trenutno promjeni na novu vrijednost.
Odziv sustava 1. reda na impulsnu promjenu vrijednosti funkcije su (t-to) = 0 za t to i za t=to je (t-to) = + svojstvo Diracove funkcije je: Analizirati ćemo odzive prouzročene pravokutnim i impulsom, na slici prikazani sa B i C. Impuls beskonačne visine i beskonačno kratkog trajanja nazivamo impuls a samu matematičku funkciju koja opisuje ovakav impuls nazivamo Diracova delta funkcija i pišemo je u obliku: (t-to) Diracova funkcija ima veliki značaj u matematici i tehničkim znanostima.
Često se koristi za matematički opis promjena vrlo kratkog trajanja, kao na primjer kada se analizira odziv kemijskog ili biokemijskog reaktora na impulsnu promjenu koncentracije u ulaznom toku. Odzive sustava 1. reda odrediti ćemo rješavanjem diferencijalne je-dnadžbe za opći oblik funkcije ulazne veličine x(t). Ponovo ćemo upotrijebiti postupak varijacije konstante. Rješenje homogene jednadžbe uvrštavamo u nehomogenu jednadžbu dobivamo: Funkciju C(t) dobijemo integracijom:
Za podintegralnu varijablu uzeta je oznaka u umjesto t da se na-znači razlika između ovih varijabli. Naravno da određeni integral ne ovisi o izboru oznake za podintegralnu funkciju. Uvrstimo rezultat u opće rješenje: Rješenje pokazuje kako je prijelazno stanje određeno zbrojem djelovanja zbog početnog stanja i ulazne veličine. Rezultat djelo-vanja ulazne veličine x(t) u trenutku t na izlaznu veličinu y(t) je određeno vrijednostima ulazne veličine od početka promjene t=0 do trenutka t (podintegralna funkciju).
Jednostavan slučaj je kada impuls (t) djeluje u trenutku t=0 a početno stanje je također yo = 0. Izlazna veličina je Primjenimo svojstvo funkcije i promjena stanja sustava 1. reda je: Ovo rješenje odgovara eksperimentu u kojem se u ulazni tok u kemijski reaktor injektira određena količina reaktanta, vidi jedna-džbu modela za primjer B. Ako se mjeri koncentracija reaktanta u izlaznom toku onda se dobije promjena koncentracije koja odgovara rješenju . Grafički prikaz je dan na slijedećoj slici:
Prijelazni odziv y(t) za t > 0 sistema 1. reda izazvan (t) Diracovom promjenom ulazne veličine uz početno stanje y(t=0)=0.
SUSTAV 2. STUPNJA Sustav 2. reda je najjednostaviji dinamički sistem koji daje prigu-šeno oscilatorno vladanje izazvano skokomičnom promjenom ulazne veličine. Brojni su primjeri takovog vladanja u prirodnim procesima i u tehničkim sustavima. Na slici je dan sistemski prikaz sistema 2. reda sa jednom ulaznom i jednom izlaznom veličinom. Ovako definirani sistem ima jednu izlaznu veličinu ali svaki sistem 2. reda obavezno ima dvije veličine stanja. Sistemski prikaz sistema 2. reda sa jednom ulaznom veličinom X i jednom izlaznom veličinom Y ( slika A) i isti sistem sa naznakom dviju veličina stanja Y1 i Y2 (slika B).
Dinamičke promjene sistema 2. reda mogu se prikazati kao prijelazni odziv izlazne veličine Y(t) ili kao trajektorija u prostoru stanja Y2=f( Y1). Grafički prikaz dinamičkog odziva sistema 2. reda. A- prijelazni odziv izlazne veličine, B- prikaz u prostoru stanja Sistem 2. reda određen je sa tri parametra, jednim statičkim parametrom i dva dinamička parametra:
K statički koeficijent pojačanja koeficijent prigušenja n frekvencija neprigušenog titraja, ili prirodna (n aturalna) frekvencija Standardna forma diferencijalne jednadžbe sistema 2. reda je uz početne uvjete y(0) i y'(0). To je linearna diferencijalna jednadžba drugog reda sa konstantnim koeficijentima. Ista jednadžba se može napisati u standardnom obliku u prostoru stanja. Transformacija u varijable stanja provodi se pomoću relacija
Primjeri sustava drugog stupnja: Jednadžba gibanja glasi gdje je: y(t) položaj utega, M je masa utega, F je vanjska sila, k je konstanta opruge i je koeficijent trenja opruge i okoline. Primjer A) Uobičajni primjer sistema 2. reda je iz mehanike ( prikaz A na slici). Promatra se gibanje utega koji visi na opruzi. Na uteg djeluje vanj-ska sila F , sila elastičnosti opruge i sila trenja opruge sa okolinom. Matematički model izvodimo na osnovu Newtonovog zakona mehanike kojim je određena relacije između ubrzanja tijela i sile.
Usporedbom sa standardnom formom za sustav 2. reda možemo utvrditi parametre: statičko pojačanje, frekvenciju nepregušenog titraja i koeficijent prigušenja Primjer B serijski spoj dvaju izoterminh protočnih reakora s kinetikom 1. stupnja