Development of Analysis Tools for Flight Control Certification
20 likes | 113 Views
This project focuses on developing robust analysis tools for flight control certification, including region-of-attraction estimation and quantifying system robustness. The approach involves simulation-based techniques and Lyapunov-based proof methods to ensure safe and stable flight control laws. Results include local stability guarantees and certified regions of attraction.

Development of Analysis Tools for Flight Control Certification
E N D
Presentation Transcript
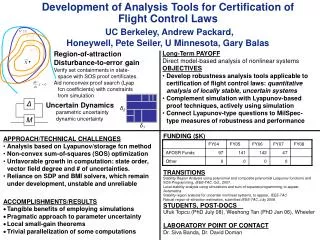
Development of Analysis Tools for Certification of Flight Control Laws UC Berkeley, Andrew Packard, Honeywell, Pete Seiler, U Minnesota, Gary Balas . Region-of-attraction Disturbance-to-error gain Verify set containments in state-space with SOS proof certificates. Aid nonconvex proof search (Lyap fcn coefficients) with constraints from simulation • Long-Term PAYOFF • Direct model-based analysis of nonlinear systems • OBJECTIVES • Develop robustness analysis tools applicable to certification of flight control laws: quantitative analysis of locally stable, uncertain systems • Complement simulation with Lyapunov-based proof techniques, actively using simulation • Connect Lyapunov-type questions to MilSpec-type measures of robustness and performance Δ • Uncertain Dynamics • parametric uncertainty • dynamic uncertainty δ2 M δ1 FUNDING ($K) TRANSITIONS Stability Region Analysis using polynomial and composite polynomial Lyapunov functions and SOS Programming, IEEE-TAC, Oct., 2007. Local stability analysis using simulations and sum-of-squares programming, to appear, Automatica. Stability region analysis for uncertain nonlinear systems, to appear, IEEE-TAC Robust region-of-attraction estimation, submitted IEEE-TAC, July 2008 STUDENTS, POST-DOCS Ufuk Topcu (PhD July 08), Weehong Tan (PhD Jan 06), Wheeler LABORATORY POINT OF CONTACT Dr. Siva Banda, Dr. David Doman • APPROACH/TECHNICAL CHALLENGES • Analysis based on Lyapunov/storage fcn method • Non-convex sum-of-squares (SOS) optimization • Unfavorable growth in computation: state order, vector field degree and # of uncertainties. • Reliance on SDP and BMI solvers, which remain under development, unstable and unreliable • ACCOMPLISHMENTS/RESULTS • Tangible benefits of employing simulations • Pragmatic approach to parameter uncertainty • Local small-gain theorems • Trivial parallelization of some computations
Provable ROA with unmodeled dynamics • Approach #1 • Parametrize fixed-structure system representing unmodeled dynamics • Compute certified invariant subset of region-of-attraction valid for all parameter values • Approach #2 • Introduce perturbation inputs/outputs as in standard linear robustness theory (μ-analysis) • Compute certified L2→L2 gain (|| ||2/2) across channel, valid over a ball of inputs. • Apply local version of small-gain theorem xδ plant controller plant controller xp xp xc xc plant controller • Approach #2, results • For all nonlinear operators Δ, mapping w= Δz, with || Δ||2/2≤0.6, and all initial conditions satisfying • Restriction: Δ must start from “rest”,but conclusion holds for high dynamic complexity (not just 1-state system in Approach #1), linear and nonlinear Δ • Approach #1, results • Family (over uncertain parameter space) of quartic Lyapunov functions certifies stability of equilibrium point (x=0) for all allowable β, γ and all initial conditions satisfying • Restriction: Conclusion is only known to hold for the special, 1-state uncertainty block as drawn. initial conditions from certified regions, Δ from its allowable class A. Packard/ UC Berkeley, P. Seiler/Honeywell, G. Balas / University of Minnesota





![Education Funding 101 [Venue] [Date]](https://cdn4.slideserve.com/8851338/education-funding-101-venue-date-dt.jpg)