4 장 근궤적법
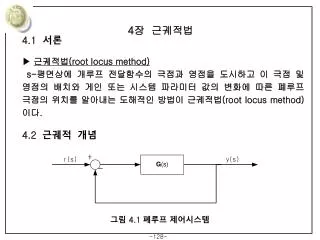
4 장 근궤적법. 4.1 서론 ▶ 근궤적법 (root locus method) s- 평면상에 개루프 전달함수의 극점과 영점을 도시하고 이 극점 및 영점의 배치와 게인 또는 시스템 파라미터 값의 변화에 따른 폐루프 극점의 위치를 알아내는 도해적인 방법이 근궤적법 (root locus method) 이다 . 4.2 근궤적 개념. 그림 4.1 폐루프 제어시스템. 폐루프 전달함수 T(s) 는. 개루프 전달함수 일반형태. 폐루프 특성방정식. 개루프 전달함수 G(s) 의 크기와 위상.

4 장 근궤적법
E N D
Presentation Transcript
4장 근궤적법 4.1 서론 ▶ 근궤적법(root locus method) s-평면상에 개루프 전달함수의 극점과 영점을 도시하고 이 극점 및 영점의 배치와 게인 또는 시스템 파라미터 값의 변화에 따른 폐루프 극점의 위치를 알아내는 도해적인 방법이 근궤적법(root locus method) 이다. 4.2근궤적 개념 그림 4.1 폐루프 제어시스템
폐루프 전달함수 T(s)는 개루프 전달함수 일반형태 폐루프 특성방정식 개루프 전달함수 G(s)의 크기와 위상
▶ 단위 피드백 제어시스템에 대한 근궤적 작도예 시스템 의 근궤적선도 ▶ 비최소위상 시스템의 근궤적 작도법
4.3 근궤적 작도법 (1) 근궤적의 수 폐루프 극점의 개수와 같다. (2) 근궤적의 출발점과 종착점 근궤적은 K = 0일 때 개루프 극점에서 출발하여 K = ∞일 때 개루프 영점에 종착한다. (3) 실수축상의 근궤적 개루프 전달함수 G(s)의 극점과 영점이 실수축상에 있을 때 근궤적은 임의의 구간에서 우측에 있는 실수축상의 개루프 극점과 영점을 합한 개수가 홀수이면 그 구간에 근궤적이 존재하고 짝수이면 근궤적이 존재하지 않는다. 의 실수축상의 근궤적
(4) 근궤적선도의 대칭성 복소근은 공액근으로서 허수부의 값이 실수축에 대해 대칭이므로 근궤적도 역시 실수축에 대하여 대칭이다. (5) 점근선의 각도와 위치 s가 ∞로 접근할 때 근궤적은 점근선(asymptote)을 갖는다. 개루프 극점의 개수가 n개이고 개루프 영점의 개수가 m개인 시스템에서 실수축과 이루는 점근선의 각도 α 실수축상에서 점근선들이 모이는 점인 점근선의 중심점 Ac
(6) 분기점 위치 두 근궤적이 실수축을 떠나는 이탈점(break-away point)과 도착하는 복귀점(break-in point)을 분기점이라고 한다. 분기점에서의 K값은 실수축상에서 극값이 되므로 특성방정식을 K = f(s) 식으로 변형한 다음 dK/ds = 0의 근이 분기점이 된다. (7) 허수축과의 교차점 근궤적이 허수축과 교차하는 순간은 시스템의 안정도가 파괴되는 임계점. 허수축과의 교차점에서의 주파수 ω와 그 때의 K값은 특성방정식에서 s값에 jω를 대입하여 실수부와 허수부를 각각 0으로 하는 두 개의 식으로부터 허수축과의 교차점에서의 주파수 ω와 그 때의 근궤적 파라미터 K를 구할 수 있다. 또한 Routh 안정도 판별법을 이용하여 위의 두 값을 구할 수도 있다.
(8) 출발점과 종착점의 각도 극점-영점 배치 및 근궤적 점 s가 근궤적상의 점이 되기 위해서는 위상조건 위의 근궤적선도에서, 극점 (-1+j1)에서 근궤적의 출발각 θ는
▶ 소스-싱크 상사 개념을 이용하여 작도한 근궤적선도 그림 4.7 소스-싱크 상사개념을 이용하여 작도한 근궤적선도의 예
4.4 근궤적 작도 예 [예제 4.5] 개루프 전달함수 의 근궤적? 1. 폐루프 특성방정식을 근궤적을 위한 일반형태로 표시한다. 2. s-평면상에 개루프 극점 3. 실수축상의 근궤적은 s = 0과 s = -4 사이에 존재한다. 4. 점근선의 각도 α는, 점근선의 중심점 Ac
5. 분기점의 위치: K = -s(s+4)(s+4+j4)(s+4-j4) 으로부터 근궤적의 이탈점이 s = -1.58에 있음 6. 허수축과의 교차점: Routh 배열 이용 s(s+4)(s2+8s+32)+K = s4+12s3+64s2+128s+K = 0 Routh 배열: c1 = 0을 만족하는 K값: K = 569 b1s2 + K = 0 -->근궤적이 허수축상에 있을 때 ω = 3.25
[예제 4.8] 다음 그림과 같이 두 개의 시스템 파라미터 a와 K를 포함하고 있는 폐루프 제어시스템에 대한 근궤적? 이 경우는 시스템 파라미터를 두 개 포함하고 있으므로 한 파라미터는 고정시키고 나머지 한 개의 파라미터를 근궤적 파라미터로 하여 근궤적을 그린 후, 고정했던 파라미터 값을 다른 값으로 고정한 후 반복 수행한다. 근궤적을 위한 일반형태로 표시한 특성방정식 위의 그림은 시스템 파라미터 K = 1, 4, 9, 16일 때 시스템 파라미터 a값의 변화에 따른 근궤적선도인 근컨투어(root-contour)선도
[예제 4.10] 비최소위상 시스템 에 대한 근궤적? 임의의 구간에서 우측에 있는 실수축상의 개루프 극점과 영점을 합한 개수가 짝수이어야 한다. 그리고 다음 식을 이용하여 s > 1, 그리고 -1 < s < 0 영역에 있는 두 개의 분기점을 구한다. dK/ds=0 의 해로부터 근궤적의 분기점이 s = 2.414와 s = -0.414에 있음을 알 수 있다.
4.5 근궤적을 이용한 제어시스템 해석 [예제 4.11] 다음 폐루프 제어시스템에 대한 근궤적선도를 그리고 폐루프 제어시스템의 안정도를 평가하기로 한다. < 폐루프 제어시스템 > < 근궤적선도> 제한된 범위의 K값인 0 < K < 14 그리고 64 < K < 195일 때만 안정. 이러한 시스템을 조건부 안정시스템(conditionally stable system). 제어시스템 설계시 조건부 안정시스템은 바람직하지 않다.
[예제 4.12] 그림 4.24에 표시된 근궤적을 보고 게인 K값에 따른 폐루프 시스템의 시간역 성능; 대표극점의 감쇠비 ζ, 2% 정착시간 ts, 단위스텝입력에 대한 정상상태오차 ess를 정성적으로 나타내기로 한다. 그림 4.24 근궤적선도
그림 4.25 게인 K값에 따른 감쇠비 ζ 그림 4.26 게인 K값에 따른 정착시간 ts 그림 4.27 게인 K값에 따른 정상상태오차 ess
4.6 근궤적을 이용한 비선형 시스템 해석 [예제 4.13] 구동기의 포화를 고려한 다음과 같은 비례 제어시스템에 대한 블록선도의 비선형 시스템에 대한 성능 및 안정도? 그림 4.28 구동기의 포화를 고려한 비례 제어시스템 그림 4.29구동기의 포화를 무시한 시스템에 대한 근궤적
그림 4.30 구동기 포화에 대한 기술함수게인 Ns 그림 4.31 그림 4.28에 표시된 비례 제어시스템의 스텝응답
4.7 MATLAB을 이용한 근궤적 [예제 4.15] MATLAB을 이용하여 다음과 같은 개루프 전달함수 G(s)의 근궤적선도를 그리기로 한다. 그리고 근궤적의 분기점 , 폐루프 시스템의 감쇠비 , 근궤적이 허수축상에 있을 때 의 근궤적 파라미터 K값과 그 때의 s값?
폐루프 제어시스템의 감쇠비 값에 따른 근궤적 파라미터 K값과 s 값을 알아야 할 경우
만일 폐루프 극점의 위치를 정확히 알 수 있는 경우에는 선을 그릴 필요없이 'rlocfind' 명령만을 추가해서 원하는 위치에 ‘+’커서를 놓고 지정해주면 그 점에서의 K값과 s값을 찾아낼 수 있다.