Multi Rotor Flying Object
COE2011-06. Multi Rotor Flying Object. อากาศยาน 4 ใบพัด. ภาควิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยขอนแก่น. โดย นายจักรกริช หล่อประโคน รหัส 513040478-0 นายจักรพรรณ ดีสุด รหัส 513040480-3. อากาศยาน 4 ใบพัด. Multi Rotor Flying Object.

Multi Rotor Flying Object
E N D
Presentation Transcript
COE2011-06 Multi Rotor Flying Object อากาศยาน 4 ใบพัด ภาควิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยขอนแก่น โดย นายจักรกริช หล่อประโคน รหัส 513040478-0 นายจักรพรรณ ดีสุด รหัส 513040480-3
อากาศยาน 4 ใบพัด Multi Rotor Flying Object หมายเลยโครงการCOE 2011-06 ผู้รับผิดชอบโครงการ นายจักรกริช หล่อประโคน รหัส 513040478-0 นายจักรพรรณ ดีสุด รหัส 513040480-3 อาจารย์ที่ปรึกษา อ.ดร.วิชชา เฟื่องจันทร์ อาจารย์ผู้ร่วมประเมิน อ.ดร.วาธิส ลีลาภัทร ผศ.ดร.ดารณี หอมดี
ความสําคัญและที่มาของโครงการความสําคัญและที่มาของโครงการ วัตถุประสงค์และขอบเขตของโครงการ การดําเนินงานโครงการ สรุปโครงการ ปัญหาและข้อเสนอแนะ หัวข้อที่นำเสนอ
ความสําคัญและที่มาของโครงการความสําคัญและที่มาของโครงการ
วัตถุประสงค์ของโครงการวัตถุประสงค์ของโครงการ 1. เพื่อออกแบบและสร้าง Multi Rotor Flying Object ควบคุมผ่านระบบไมโครคอนโทรลเลอร์ 2. เพื่อประยุกต์ใช้งานเซนเซอร์ ได้แก่ Gyroscope และ Accelerometer 3. เพื่อออกแบบและสร้างระบบควบคุมการบินของ Multi Rotor Flying Object ขอบเขตของโครงการ เพื่อพัฒนาเครื่องบินที่สามารถบินลอยนิ่งในอากาศหรือสามารถควบคุมผ่านรีโหมดบังคับได้ และศึกษาปัจจัยที่มีผลต่อการบิน • ผลที่คาดว่าจะได้รับ • 1.ได้เรียนรู้การออกแบบและสร้างระบบไมโครคอนโทรลเลอร์และการใช้งานเซนเซอร์ 2.ได้เครื่องบินสี่ใบพัด ที่สามารถควบคุมได้โดยรีโมทคอนโทรล 3.เพื่อเป็นต้นแบบในการพัฒนาต่อยอดต่อไป
หลักการควบคุมเครื่องบินหลักการควบคุมเครื่องบิน (Hovering) LEFT Ω+∆ FRONT Ω+∆ (Throttle) (yaw) REAR Ω+∆ RIGHT Ω+∆ (Roll) (pitch)
ทฤษฎีการควบคุม แผนภาพการทำงาน2ndComplementary filter แผนภาพระบบควบคุม
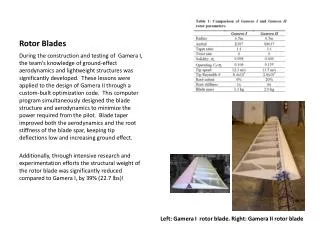
การออกแบบและสร้างต้นแบบการออกแบบและสร้างต้นแบบ • โครงสร้างทางกล • ภาพ โครงสร้างของเครื่องบิน • ที่ออกแบบไว้ • ภาพ โครงสร้างของเครื่องบิน • ที่พัฒนาขึ้น
การออกแบบและสร้างต้นแบบการออกแบบและสร้างต้นแบบ • โครงสร้างทางไฟฟ้า • ภาพ โครงสร้างทางไฟฟ้า • ที่ออกแบบไว้ • ภาพ โครงสร้างทางไฟฟ้า • ที่พัฒนาขึ้น
การออกแบบและสร้างต้นแบบการออกแบบและสร้างต้นแบบ • การประกอบชิ้นส่วน • ภาพ เครื่องบินที่พัฒนาขึ้น
การทำงานของเครื่องบินการทำงานของเครื่องบิน • แผนภาพการทำงานของระบบ • ภาพ การควบคุมทิศทาง
การพัฒนาโครงการ 1. อ่านข้อมูลจากเซนเซอร์ 1.1 ไจโรสโคป (Gyroscope) 1.2 ตัววัดความเร่ง (Accelerometer) 2. เขียนโปรแกรมบนไมโครคอนโทรลเลอร์ 3. ทดสอบการใช้งานของโปรแกรม 4. การทดลองและประยุกต์ใช้ทฤษฎีที่ที่เกี่ยวข้อง
2. เขียนโปรแกรมบนไมโครคอนโทรลเลอร์ • อ่านค่าอนาล็อก(Analog) จากไจโรและตัววัดความเร่ง • ส่งข้อมูลจากไมโครคอนโทรเลอร์ไปยังคอมพิวเตอร์โดยใช้สาย Serial • การสั่งงาน PWM (Pulse width modulation) เพื่อไปควบคุมมอเตอร์ผ่านทาง ESC (Electronic speed control) • รับสัญญาณจากตัวรับสัญญาณวิทยุ (Receiver) ซึ่งมีทั้งหมด 4 ช่องสัญญาณ
การทดสอบการทำงานของโปรแกรมการทดสอบการทำงานของโปรแกรม • - สามารถอ่านค่าอนาล็อกของไจโรและตัววัดความเร่งและส่งค่าไปแสดงบนคอมพิวเตอร์ได้ • สามารถควบคุมมอเตอร์แต่ละตัวแยกกันได้ • - อ่านค่าจากตัวรับสัญญาณวิทยุและและนำไปบังคับความเร็วของมอเตอร์แต่ละตัวได้
การทดลองและประยุกต์ใช้ทฤษฎีที่ที่เกี่ยวข้องการทดลองและประยุกต์ใช้ทฤษฎีที่ที่เกี่ยวข้อง ทดลองตัวกรอง Complementary filter deg ms
4. การทดลองและประยุกต์ใช้ทฤษฎีที่ที่เกี่ยวข้อง
สรุป • ในการออกแบบอากาศยานสี่ใบพัด ที่มีความสมดุลได้นั้นจำเป็นต้องใช้เซนเซอร์ที่ช่วยในการทรงตัวได้แก่ ไจโร และตัววัดความเร่ง ในการใช้งานเซนเซอร์จำเป็นต้องมีการใช้ตัวกรองสำหรับการรวมมุมที่ได้จากเซนเซอร์ทั้งสอง ซึ่งจะทำให้มุมที่ได้มีความถูกต้องสมบูรณ์มากขึ้น สิ่งที่สำคัญที่สุดสำหรับโครงงานนี้ก็คือการทำให้อากาศยานมีความสมดุลทั้งแกน x และแกน y พร้อมกันและต้องไม่เกิดการหมุนวนรอบตัวในทิศ Yaw ผลที่ได้จากการปฏิบัติงานคืออากาศยานสามารถสมดุลได้ในทางแกน x และ แกน y ในการทดสอบ แต่เมื่อมีการใช้งานจริง ในขณะบิน อากาศยานเกิดความไม่สมดุล และเกิดการหมุนในทิศ Yaw
เอกสารอ้างอิง • “Quadcoptor” , International Conference on Smart Manufacturing Application April. 9-11, 2008 in KINTEX, Gyeonggi-do, Korea สืบค้นเมื่อ วันที่ 2 กรกฎาคม2554 • ภาพ ลักษณะการบินของ Quadcoptor , http://diydrones.com สืบค้นเมื่อ วันที่ 2 กรกฎาคม2554 • ภาพ มอเตอร์กระแสตรงแบบไร้แปรงถ่าน (Brushless DC motor) , http://www.bphobbies.com • สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ Electronic Speed Controller: ESC , http://www.silashop.net สืบค้นเมื่อ • วันที่18 กรกฎาคม 2554 • ภาพ ใบพัด GAUI ขนาด 8 นิ้ว http://www.heli-shop.com สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ แบตเตอรี่ Lithium-Polymer 11.1 โวลต์ 2200mAh , http://www.minircflying.com สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ ไมโครคอนโทรลเลอร์ AVR เบอร์ ATMEGA128 ,http://micro- research.co.th สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ 6DOF Razor ไจโคสโคป (Gyroscope) และ ตัววัดความเร่ง (Accelerometer) , • http://www.thaieasyelec.com/ สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ วิทยุควบคุมและเครื่องรับสัญญาณ http://www.chartbin.com/ สืบค้นเมื่อ วันที่18 กรกฎาคม 2554
คำถาม ? ข้อเสนอแนะ