Download
1 / 1
10 likes | 126 Views
seed. seed. F ← y = a x 2. F ← y = a x 2. r. r. r. r. F ← y = a x 2. c ← ( x i , y i ) r 2 ← (x- c x ) 2 + (y- c y ) 2. c. c ← ( x i , y i ) r 2 ← (x- c x ) 2 + (y- c y ) 2. F ← y = -x √3. F ← y = x √3. F ← y = 0. F ← y = 0.

E N D
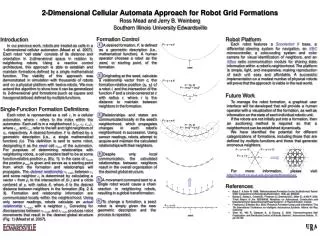
seed seed F← y = a x2 F← y = a x2 r r r r F← y = a x2 c← (xi, yi) r2← (x-cx)2 + (y-cy)2 c c← (xi, yi) r2← (x-cx)2 + (y-cy)2 F← y = -x √3 F← y = x √3 F← y = 0 F← y = 0 2-Dimensional Cellular Automata Approach for Robot Grid Formations Ross Mead and Jerry B. Weinberg Southern Illinois University Edwardsville Formation Control Robot Platform Introduction Each robot features a Scooterbot II base, a differential steering system for navigation, an XBC microcontroller, a color-coding system and color camera for visual identification of neighbors, and an XBee radio communication module for sharing state information within a robot’s neighborhood. The platform is simple, light, and inexpensive, making reproduction of each unit easy and affordable. A successful implementation on a modest number of physical robots will prove that the approach is viable in the real world. A desired formation, F, is defined as a geometric description (i.e., mathematical function). A human operator chooses a robot as the seed, or starting point, of the formation. In our previous work, robots are treated as cells in a 1-dimensional cellular automaton (Mead et al. 2007). Each robot “cell state” consists of its distance and orientation in 2-dimensional space in relation to neighboring robots. Using a reactive control architecture, this approach is able to establish and maintain formations defined by a single mathematical function. The viability of this approach was demonstrated in simulation with thousands of robots and on a physical platform with twelve robots. We now extend the algorithm to show how it can be generalized to 2-dimensional grid formations (such as square and hexagonal lattices) defined by multiple functions. 1 Originating at the seed, calculate a relationship vector from c, the formation-relative position (xi, yi) of a robot i, and the intersection of the function F and a circle centered at c with radius r, where r is the distance to maintain between neighbors in the formation. 2 Future Work To manage the robot formation, a graphical user interface will be developed that will provide a human operator with a visualization of the formation, as well as information on the state of each individual robotic unit. If the robots are not initially put into a formation, then an auctioning method is required so that a neighborhood can be established dynamically. We have identified the potential for different categorizations of formations, including those that are defined by multiple functions and those that generate erroneous neighbors. For more information, please visit http://roboti.cs.siue.edu/projects/formations. Single-Function Formation Definitions Relationships and states are communicated locally in the seed’s neighborhood, which propagates changes in each robot’s neighborhood in succession. Using sensor readings, robots attempt to acquire and maintain the calculated relationships with their neighbors. Each robot is represented as a cell ci in a cellular automaton, where i refers to the index within the automaton. Each cell is in a neighborhood {ci-1, ci, ci+1}, where ci-1 and ci+1 refer to the left and right neighbors of ci, respectively. A desired formation F is defined by a geometric description (i.e., a single mathematical function) f(x). This definition is sent to some robot, designating it as the seed cell cseed of the automaton. For purposes of determining relationships with neighboring robots, a cell considers itself to be at some function-relative position pi (Eq. 1); in the case of cseed, the position pseed is given and serves as a starting point from which the formation and relationships will propagate. The desired relationshipri→j,des between ci and some neighbor cj is determined by calculating a vector v from pi to the intersection of f(vx) and a circle centered at pi with radius R, where R is the desired distance between neighbors in the formation (Eq. 2 & 3). Formation and relationship information are communicated locally within the neighborhood. Using only sensor readings, robots calculate an actual relationshipri→j,act with a neighbor cj. Correcting for discrepancies between ri→j,des and ri→j,act produces robot movements that result in the desired global structure (Fig. 1) (Mead et al. 2007). 3 Despite only local communication, the calculated relationships between neighbors result in the overall organization of the desired global structure. 4 A movement command sent to a single robot would cause a chain reaction in neighboring robots, resulting in a global transformation. 5 References • Balch T. & Arkin R. 1998. “Behavior-based Formation Control for Multi-robot Teams” IEEE Transactions on Robotics and Automation, 14(6), pp. 926-939. • Bekey G., Bekey I., Criswell D., Friedman G., Greenwood D., Miller D., & Will P. 2000. “Final Report of the NSF-NASA Workshop on Autonomous Construction and Manufacturing for Space Electrical Power Systems”, 4-7 April, Arlington, Virginia. • Fredslund J. & Mataric M.J. 2002. “Robots in Formation Using Local Information”, The 7th International Conference on Intelligent Autonomous Systems, Marina del Rey, California. • Shen W., Will P., Galstyan A., & Chuong C. 2004. “Hormone-Inspired Self-Organization and Distributed Control of Robotic Swarms”, Autonomous Robots, 17, pp. 93-105. To change a formation, a seed robot is simply given the new geometric description and the process is repeated. 6