Download

1 / 11
110 likes | 263 Views
Wandering Ambassador P13215. Baabak Mamaghani (EE) Team Lead David Gillette (EE) PCB Matt Pendel (EE) PCB/Enclosure Armando Briones (CE) Software Sagar Saxena (EE) Controller Anjit Rana (EE) Navigation Professor George Slack (EE) Advisor/Customer. Project Description.

E N D
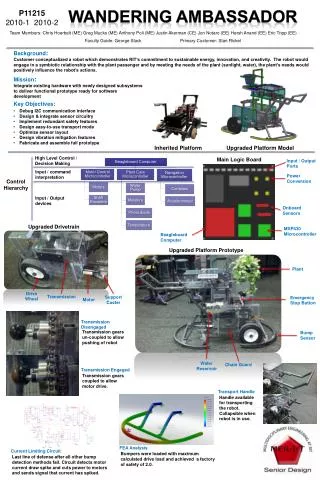
Wandering Ambassador P13215 Baabak Mamaghani (EE) Team Lead David Gillette (EE) PCB Matt Pendel (EE) PCB/Enclosure Armando Briones (CE) Software Sagar Saxena (EE) Controller Anjit Rana (EE) Navigation Professor George Slack (EE) Advisor/Customer
Project Description Overhaul of the Wandering Ambassador, a legacy project, with an emphasis on maintainability and expandability
High Level Customer Needs • Rebuff the robot • Redesign the PCB for expandability • Create electronic storage box • Wireless remote control • Develop a navigation system • Implement code for control and navigation • Document everything (Wandering Ambassador Manual)
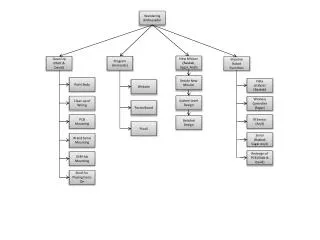
Concept Summary Battery Screen Power Regulator HDMI Encoders PCB Panda Board Psoc5 I/O Sonar USB Mouse Expansion for Sensors Motor Controller Keyboard Left Motor Right Motor
Design Summary • Robot is moving with the help of Sonars and Encoders • Working PCB • Working Regulators • Better Aesthetics • Code is efficient. • Overall, project is a success!
System Testing Results • Sonars and encoders were tested and were found to perform as expected • The newly designed motherboard has better space efficiency and ports for daughter boards for future expansion • The new web-based GUI is more intuitive • Transition from polling paradigm to interrupt-driven software was successful • The RC controller was made to make the robot move without the website. • Verification and reintegration of the two ARM processors
Objective Project Evaluation: Success and Failure • Core objectives were met: • Hardware and software overhaul • Maintainability and expandability • Additional features • More intuitive GUI • New RC controller module • Working battery meter • Unrealized endeavors • RFID implementation • Pure UART communication
Opportunities/Suggestions for Future Work • Implementation of RFIDs for autonomous navigation • Daughter boards for sonars and other sensors • Implement a more powerful computer (for autonomy) • Webcam integration • Moving limbs • Wandering Ambassador Wall-E