Download
1 / 1
20 likes | 200 Views
CMPE 450 Capstone Design Project iOS Remote Control Car. iOS User Interface. Design. Overview

E N D
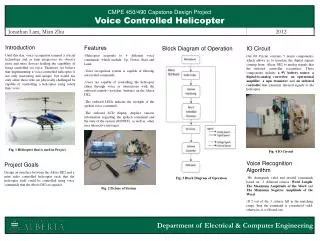
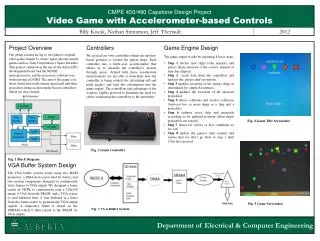
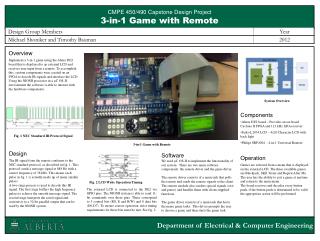
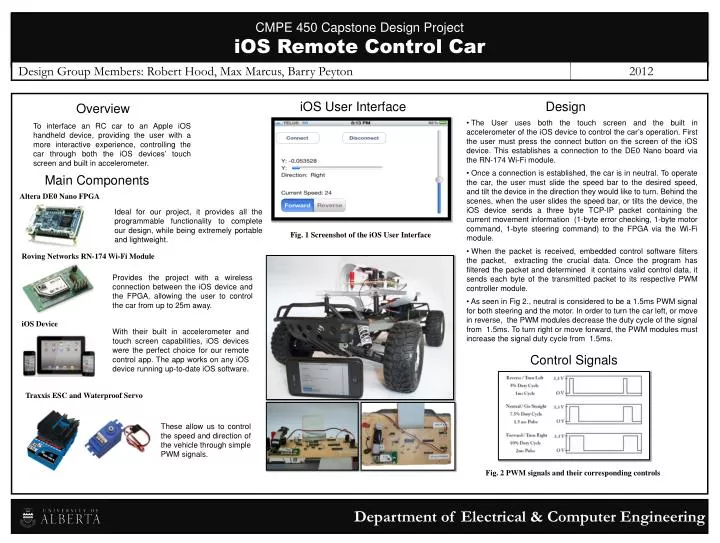
CMPE 450 Capstone Design Project iOS Remote Control Car iOS User Interface Design Overview To interface an RC car to an Apple iOS handheld device, providing the user with a more interactive experience, controlling the car through both the iOS devices’ touch screen and built in accelerometer. • The User uses both the touch screen and the built in accelerometer of the iOS device to control the car’s operation. First the user must press the connect button on the screen of the iOS device. This establishes a connection to the DE0 Nano board via the RN-174 Wi-Fi module. • Once a connection is established, the car is in neutral. To operate the car, the user must slide the speed bar to the desired speed, and tilt the device in the direction they would like to turn. Behind the scenes, when the user slides the speed bar, or tilts the device, the iOS device sends a three byte TCP-IP packet containing the current movement information (1-byte error checking, 1-byte motor command, 1-byte steering command) to the FPGA via the Wi-Fi module. • When the packet is received, embedded control software filters the packet, extracting the crucial data. Once the program has filtered the packet and determined it contains valid control data, it sends each byte of the transmitted packet to its respective PWM controller module. • As seen in Fig 2., neutral is considered to be a 1.5ms PWM signal for both steering and the motor. In order to turn the car left, or move in reverse, the PWM modules decrease the duty cycle of the signal from 1.5ms. To turn right or move forward, the PWM modules must increase the signal duty cycle from 1.5ms. Main Components Altera DE0 Nano FPGA Ideal for our project, it provides all the programmable functionality to complete our design, while being extremely portable and lightweight. Fig. 1 Screenshot of the iOS User Interface Roving Networks RN-174 Wi-Fi Module Provides the project with a wireless connection between the iOS device and the FPGA, allowing the user to control the car from up to 25m away. iOS Device With their built in accelerometer and touch screen capabilities, iOS devices were the perfect choice for our remote control app. The app works on any iOS device running up-to-date iOS software. Control Signals Traxxis ESC and Waterproof Servo These allow us to control the speed and direction of the vehicle through simple PWM signals. Department of Electrical & Computer Engineering Fig. 2 PWM signals and their corresponding controls