Download
1 / 34
350 likes | 526 Views
Stationary State Frictional Sliding. m ss= = t/s= m * +(a-b) ln(V/V * ). a-b < 0 slip is potentially unstable. a-b > 0 stable sliding. a-b. Correspond to T~300 °C For Quartzo-Feldspathic rocks. ( Blanpied et al , 1991). Modeling the Seismic Cycle from Rate-and-state friction

E N D
Stationary State Frictional Sliding mss== t/s= m*+(a-b) ln(V/V*) a-b < 0 slip is potentially unstable a-b > 0 stable sliding a-b Correspond to T~300 °C For Quartzo-Feldspathic rocks (Blanpied et al, 1991)
Modeling the Seismic Cycle from Rate-and-state friction (e.g., Tse and Rice, 1986) Slip as a function of depth over the seismic cycle of a strike–slip fault, using a frictional model containing a transition from unstable to stable friction at 11 km depth (Sholz, 1998)
Model of afterslip Evolution of afterslip on BCFZ with time Slip velocity (or slip rate) on BCFZ background loading rate afterslip duration Figure 2, 2004
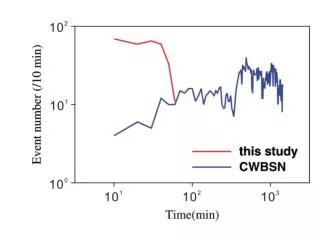
Model of aftershock rate Key assumption: seismicity rate is proportional to the stress rate (time derivative of applied stress, or loading) slope of 1/t C = 100 Figure 4, 2004 Note: the decrease in seismicity rates lasts longer than increase in seismicity rate.
(Svarc and Savage, 1997) Postseismic Displacements following the Mw 7.2 1992 Landers Earthquake CPA analysis show that all GPS stations follow about the same time evolution f(t)
Modeling Landers afterslip Step 4: Compute displacement U(r,t) in a bulk:
Modeling Landers afterslip Step 5: Find the best-fitting model parameters to the geodetic data maybe due to dynamic stress change too small: maybe due to high pore-pressure Figure 4, 2007
rms=16mm Observed and predicted Displacements relative to Sanh Cumulative displacements after 6 yr
DCFF on 340ºE striking fault planes at 15 km depthdue to afterslip 6 yr 6 months Figure 9, 2007 DCFF (bar)
DCFF on 340ºE striking fault planes at 5, 10, and 15 km depthdue to afterslip Figure 10, 2007
Aftershocks tend to fall preferentially in area of static Coulomb stress increase but there are also earthquakes in area of decrease Coulomb stress Aftershocks follow the Omori Law (seismicity rate decays as 1/t) >> the stress history at the location of each aftershocks is a step function and a static Coulomb failure criterion is rejected. Failure needs being a time depend process. OR >> the postseismic stress is time dependent in a way that controls the seismicity rate.
Ge277-Experimental Rock Frictionimplication for Aftershocks triggering Dieterich, J. H. (1994). A constitutive law for rate of earthquake production and its application to earthquake clustering. JGR 99, 2601–2618. Gomberg, J. (2001), The failure of earthquake failure models, Journal of Geophysical Research-Solid Earth, 106, 16253-16263. Gross, S., and C. Kisslinger (1997), Estimating tectonic stress rate and state with Landers aftershocks, Journal of Geophysical Research-Solid Earth, 102, 7603-7612. King, G.C.P., and M. Cocco (2001). Fault interaction by elastic stress changes: New clues from earthquake sequences. Adv. Geophys. 44. Perfettini, H., J. Schmittbuhl, and A. Cochard (2003a). Shear and normal load perturbations on a two-dimensional continuous fault: 1. Static triggering. JGR 108(B9), 2408. Perfettini, H., J. Schmittbuhl, and A. Cochard (2003b). Shear and normal load perturbations on a two-dimensional continuous fault: 2. Dynamic triggering. JGR 108(B9), 2409.
Time Delay Explanations • Failure model involving a nucleation phase (rate-and-state friction, static fatique) • fluid flow • postseismic relaxation / creep in the crust, either on faults or distributed through a volume • viscoelastic relaxation of the lithosphere and asthenosphere • continued progressive tectonic loading adding to postearthquake stresses
Rate-and-State Friction King & Cocco (2001) • Constitutive laws can be described by two coupled equations: • the governing equation, which relates sliding resistance (or shear stress) to slip velocity V and state variables i : = F (V, i, a, b, 0, n) where a and b are positive parameters, 0 is a reference friction,and n is normal stress • the evolution equation, which provides time evolution of the state variable: /t = G (V, L, , b) • Dieterich (1994) uses :
Rate-and-State Friction Dieterich (1994) • Dieterich derives two likely equations to describe seismicity rate as a function of time: • Note that (13) has the form of Omori’s law: R = K / (c + t) • Similarly (12) gives Omori’s law for t/ta<1 but seismicity rate merges to the steady state background rate for t/ta>1 • This makes (12) preferable in general
Rate-and-State Friction Perfettini et al. (2003a,b)
Rate-and-State Friction Perfettini et al. (2003a,b)
Rate-and-State Friction Perfettini et al. (2003a,b)
Rate-and-State Friction Perfettini et al. (2003a,b)
Rate-and-State Friction Perfettini et al. (2003a,b)
Rate-and-State Friction Perfettini et al. (2003a,b)
Rate-and-State Friction Perfettini et al. (2003a,b) • In the previous figures, Perfettini et al. considered permanent variations of the normal stress (loading or unloading step) • Perfettini et al. show more generally that all stresses for whichCFF(,) are the same are equivalent for this purpose
Rate-and-State Friction Perfettini et al. (2003a,b) • Except near the end of the earthquake cycle, the prediction of the Coulomb failure criterion, in terms of clock advance/decay, agrees to the first order (i.e., neglecting the small oscillations) • This agreement may explain the success of the Coulomb failure criterion in modeling many earthquake sequences • The discrepancy at the end of the cycle comes from the fact that varies significantly at the end of the cycle • The departure from a Coulomb-like behavior later in the cycle is the self-accelerating phase • The transition from the locked to the self-accelerating phase occurs when the state variable becomes greater than its steady state value, i.e., when > ss = Dc/V or when > ss
Rate-and-State Friction Perfettini et al. (2003a,b) • One major difference between the Coulomb failure model and their results is that, at the end of the earthquake cycle, the clock delay due to unloading steps drops to zero; one example of such an effect is the 1911 Morgan Hill event occurring in the 1906 stress shadow • In other words, a fault at the end of its cycle seems to be only slightly sensitive to external stress perturbations, the nucleation process being underway
Influence of Pulse Duration in Dynamic Triggering Perfettini et al. (2003a,b)