Undirected ST-Connectivity In Log Space
440 likes | 603 Views
Undirected ST-Connectivity In Log Space. Omer Reingold Slides by Sharon Bruckner. Today. Some history What are we adding to the mix? Connectivity in expanders Making expanders: powering it up and cutting it down Putting it together in Log-Space In conclusion. Some History.

Undirected ST-Connectivity In Log Space
E N D
Presentation Transcript
Undirected ST-Connectivity In Log Space Omer Reingold Slides by Sharon Bruckner
Today • Some history • What are we adding to the mix? • Connectivity in expanders • Making expanders: powering it up and cutting it down • Putting it together in Log-Space • In conclusion
Some History • What is ST-Connectivity? • What do we know about it? • What are we trying to accomplish?
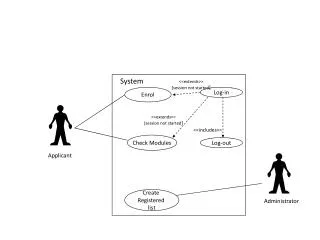
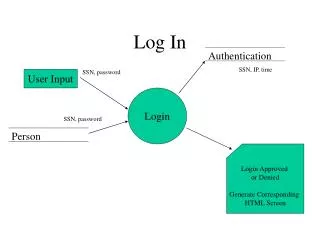
What is ST-Connectivity? • Given a graph G and two vertices s and t: • YES if there is a s-t path in G • NO otherwise • Two flavors to the problem: • STCON: G is directed • USTCON G is undirected. • Today we’ll talk about USTCON
What do we know about it? • Solved easily with BFS • But – polynomial space! • USTCON is in NL (=NSPACE(log)) • Just guess the path • USTCON is in DSPACE(log2n) (Savitch) • Guess a vertex on the path, recurse • USTCON is in RL • Random walk • Randomness is a resource! • USTCON is complete for SL
We would like an algorithm for USTCON which is deterministic and works in space logarithmic in the size of the graph What are we trying to accomplish?
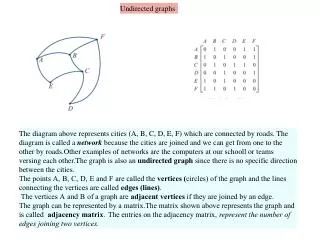
Useful Notations • The adjacency matrix of a graph G • We’ll use D regular graphs and the normalizedadjancecy matrix: (1/D)M ,
Useful Notations • M is a stochasticmatrix, and serves as the “random walk” matrix. • Largest eigenvalue of M is 1, with eigenvector (1,1,…,1)єRn ,2nd largest eigenvalue is λ(G). • A (N,D,λ) graph is a D regular graph over N vertices with λ(G) ≤ λ
Expanders – a Reminder Note that the adjacency matrix in this case in normalized! Two equivalent definitions of expander • (N,D, λ) is an expander iff the spectral gap 1- λ > 0 • (N,D, λ) is an expander if there exists ε>0 such that for any set S of at most half the vertices in G, at least (1+ ε)|S| vertices of G are connected to some vertex in S
Connectivity in Expanders What would happen if each connected component of our graph was an expander? We could decide USTCON in logspace!
Every expander has a O(log(N)) diameter Theorem: For any s and t in an expander, there’s a path from s to t of length O(log(N))
Logspace Algorithm for paths in an expander For a (N,D, λ) expander there is a a space O(logD*logN) algorithm which decides USTCON for any s and t Idea: • From any vertex s there are Dl=O(logN) different paths. • enumerate and check if any of them reach t.
How much does it cost? • At each vertex we have a choice of D vertices, log(D) to represent 1…D. • Each path is log(N) long. • we need log(D) at each stage of a log(N) path, altogether O(logD*logN)
So far We now know that if our graph G was an expander graph, USTCON can be solved in Log-Space. How can we turn G into a graph of expanders?
Making expanders: • powering it up and cutting it down
What do we want from the expander graph G’? • There is a path from s to t in G if and only if there is a path from s’ to t’ in G’. • Each connected component is an expander, with constant expansion • Construction in Log-Space.
The Plan • New tools for our toolbox • Rotation Maps • Powering • Zig Zag products • The actual construction • Why we got what we wanted • Why we got it in Log-Space
8 Zig Zag Powering Overview • Series of powering by 8 and zig zag products, one increases the spectral gap and the other one decreases it, but not by much. O(Log(N))
Rotation Maps • This is the notation we’ll use in this algorithm Let G be a D regular undirected graph. The rotation map If the edge (v,w) exists and is the ith edge coming out of v and the jth edge coming out of w
Rotation Map Example 3 2 4 1 1 2 … 3 4 … v 28 17 … … u 54 54 55 55
Powering No limitations on the degree → can expenderize with powering: The k-th power of the D-regular graph G is Gk where there is an edge (u,v) iff there is a path of length ≤ k between u and v in G. There can be multiple edges! ≤k
Powering What is it good for? • GN is an N-clique an expander • If G = (N,D, λ) then Gk is a (N,Dk, λk) λ(G) The spectral gap • Why is this not enough?
v is now Hv Zig Zag Product If G is a D-regular graph with N vertices and H is a d-regular graph with D vertices, we replace each v in G with a copy of H, Hv. Therefore, our new graph has [N]x[D] vertices. Part of G v H
a’ i i’ v a’ j b z z b’ a j’ G i w b’ G H j G Z H b Zig-Zag Product The resulting graph is a d2 regular graph, with edges as follows: Hv a Hw
Zig-Zag Product From last week: If G is an (N,D,λ) graph and H is a (D,d,) graph, then The zig-zag product doesn’t hurt the spectral gap too badly!
G G2 12 v 5 3,12 3 8 u u w w u u v 8,5 G Gk a1 a2 ak … a1,..,ak bk b1 v b(k-1) bk,..,b1 Rotation Map for Powering
(v,a) (v,a’) i i’ Hv z G H Rotation Map for Zig Zag Rot ((v,a), (i,j)) = v a’ b’ G w Hw j’ j (w,b’) (w,b)
The Actual Construction Show a transformation that turns every connected component of a graph into an expander. But! Not any graph, but a D16 regular graph. How to construct such a graph - later
Main Transformation On input G and H, where G is a D16 regular graph on N vertices, and H is a D-regular graph on D16 vertices Gi is a D16 regular graph, with N*(D16)i vertices
Details • Set l to be the smallest integer s.t. If D is constant, then this number is O(logN). • Gl has poly(N) vertices. • Every iteration can be done in logspace! • Transforming the entire graph is equivalent to transforming each connected component separately
More Details S2 S3 S1 S2 S3 S1
Why ? Show that this is true for a single iteration. Both powering and zig zag maintain the block structure Adjacency matrix sorted by connected components
Why is this an expander? G and H be inputs of above. If and G is connected and non-bipartite then Which means that the output of is indeed an expander. Non bipartite means that G cannot be split into two sets of vertices where all the edges of G are between those two sets
Proof G0=G, connected and non-bipartite. Therefore, (inequality) Since We’ll show and from the lemma we get
Proof Continued We saw that if G = (N,D,λ) then Gt = (N,Dt,λt) = We can bound λ(Gi) by For each i, one of two cases occurs: Otherwise, it’s always true that
What do we want from the expander graph G’? • There is a path from s to t in G if and only if there is a path from s’ to t’ in G’. • Each connected component is an expander. • Construction in Log-Space.
Input Tape RotG RotH Log Space Construction Prove that for any D, can be calculated in space O(log(N)).
Proof Idea: Evaluating RotGi+1 for each pair takes just a constant additional amount of memory over evaluating RotGi. And all recursions use the same space!
Proof - Continued A will allocate the variables: v in [N] (from the original G) a0, …, al in [D16] (vertex names in H)