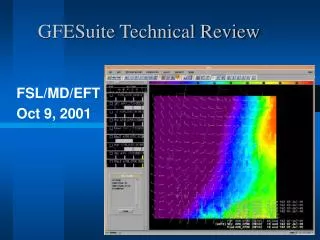
Technical Review
Technical Review. Alex Miller Jordan Bridgeman Diane Van Hoy. Revised requirements. Requirements continued. More requirements. Conops Update. Conops Update (cont.). Rocker –Bogie Design. http://www.youtube.com/watch?v=H0KQF50vV5E. Wheels. Suspension Arms. Motors.

Technical Review
E N D
Presentation Transcript
Technical Review Alex Miller Jordan Bridgeman Diane Van Hoy
Rocker –Bogie Design http://www.youtube.com/watch?v=H0KQF50vV5E
Wheels Suspension Arms Motors • Must provide 50 cm of ground clearance from bottom frame of rover • Suspension arms will produce ground clearance beyond the wheel radius (minus expected soil sink) • Must be able to turn wheels independently • In-wheel design • Electric motors • Torque requirement such that rover can climb 45 deg. Slopes with 30% power loss (slippage) on 4 wheels • 6 wheels = 6 motors • In the event of motor loss, “freewheeling” ability. • Forward and reverse ability. • David A. Kring conducted a mobility review of lunar missions as part of the lunar exploration initiative. • http://www.lpi.usra.edu/science/kring/lunar_exploration/briefings/lunar_mobility_review.pdf • His investigation warned of soft lunar soil with average wheel sink of 2 cm away from craters, and up to 20 cm near and inside of craters • Apollo LRV was stuck, had to be moved by astronauts to become free; not possible with Intrepid rover. • Also indicated that round wheels work well as long as contact pressure does not exceed 7-10 kPa • This translates into wheel dimensions such that contact area with lunar surface is at least 0.004 m^2 per wheel per 100kg of rover mass.
Collision Avoidance System • Stereo imaging from navcams and hazcams sent to computer • Computer processes stereo data with collision avoidance software • Preset navigation choices (geologic POIs) are the destinations for autonomous travel. Routes are designed from lunar orbiter topographic data, but real-time processing of navcam and hazcam images decides the safest route in immediate vicinity (<1000m) • Safe routes determined by height of rocks and slope/roughness of terrain; ability for rover to traverse based on pre-determined parameters. • Real-time autonomous software will allow for average speed of 1km/hr • Hazcams will initiate 'safe-mode' if unsafe obstacle is 3m away to prevent impact (2m @ 1km/hr ~7 sec. until impact)
Collision Avoidance System Topographical data from lunar orbiters Initial route planning >1000m Image data from NavCam Coarse path corrections based on NavCam data <1000m Image data from HazCams Fine path corrections based on HazCam data <10m Safe Navigation! Mission Success!