Download
1 / 1
10 likes | 143 Views
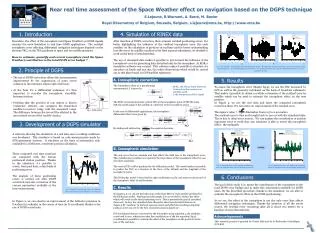
Near real time assessment of the Space Weather effect on navigation based on the DGPS technique S.Lejeune, R.Warnant, A. Barré, M. Bavier Royal Observatory of Belgium, Brussels, Belgium, s.lejeune@oma.be, http://www.oma.be . 1. Introduction. 4. Simulation of RINEX data.

E N D
Near real time assessment of the Space Weather effect on navigation based on the DGPS technique S.Lejeune, R.Warnant, A. Barré, M. Bavier Royal Observatory of Belgium, Brussels, Belgium, s.lejeune@oma.be, http://www.oma.be 1. Introduction 4. Simulation of RINEX data Nowadays, the effect of the ionosphere (and Space Weather) on GNSS signals remains the main limitation to real time GNSS applications. The residual ionospheric error affecting differential navigation techniques depends on the absolute TEC, on the TEC gradients in space and on satellite geometry. How to estimate, quantify and correct ionosphere (and the Space Weather) contribution to the total DGPS error budget? After insertion of DGPS correction, there remains residual positioning errors. For better highlighting the influence of the residual ionospheric error (for each satellite) on the calculation of positions in real time and for better understanding how the errors by satellite combine in the least squares adjustment, we decided to work on the basis of simulated data. The use of simulated data makes it possible to put forward the influence of the ionospheric error by generating data disturbed only by the ionosphere. At ROB, a simulation software was created. This software makes it possible to simulate, for any place on Earth and any day, the codes observations which would be carried out in this place based on GPS satellite ephemeris. A. B. C. Fig 3. A. Potsdam TEC predicted by the Klobuchar model B. Potsdam residual positioning error per satellite due to the ionosphere C. Potsdam global positioning error resulting from the least square adjustment made on all the satellites in view. 2. Principle of DGPS • The use of DGPS corrections allows the measurements improvement by the suppression of some errors common to the reference station and a field user. • At the base it’s a differential technique, it’s thus important to consider the ionospheric variability between stations. • Profiting that the position of one station is known (‘reference’ station), one compares the theoretical satellite-to-receiver range with the measured range. The difference between the two will be allotted to the uncorrected errors of the ‘mobile’ station. 5. Results A. Ionospheric correction The ionospheric effect on a pseudorange measurement, I, is given by: To assess the ionospheric error (thanks Eq.4), we use the TEC measured by GPS as well as the geometry calculated on the basis of broadcast ephemeris. That makes it possible to obtain a realistic estimation of the residual error by satellite which can be used to estimate the ionospheric effect on the user position. In Figure 4, we use the real data and inject the computed ionospheric correction there. We can notice an improvement of the residual error. The sigma’s value diminishes from 2.15 to 0.92 meters. The residual error is thus not brought back to zero as with the simulated data. This is due to other error sources. We can analyse the contribution of another important error to verify that own simulator is able to assess the ionospheric effect : the multipath. • STEC, the Slant Total Electron Content on the receiver-to-satellite path • f, the frequency of the signal Eq.1 The STEC is transformed into vertical TEC at the ionospheric point (VTECIP) using ZIP, the zenith angle of the satellite as ‘observed’ at the ionospheric point: Fig 1. DGPS system In the case of differential applications, the ionospheric differential effect I12 is given by: Eq.2 3. Development of a DGPS simulator Eq.3 By adding and subtracting , the equation becomes: A software allowing the simulation of a real time user’s working conditions was developed. This simulator is based on code measurements made by GPS permanent stations. It simulates on the basis of information only available for a field user, a real time position calculation. Eq.4 B. Ionospheric simulation These computed real time positions are compared with the known permanent station position. Thanks to the simulator, it’s possible to create, from past data, a data bank of positioning error. The analysis of these positioning errors is carried out after DGPS correction and also correction of the various parameters available at the time measurement. The only error that we simulate and that affects the field user is the ionospheric error. This consideration enables us to quantify the importance of the ionospheric effect for one day taken randomly. The vertical TEC will be predicted by the Klobuchar model. This model makes it possible to predict the TEC, as a function of the time, of the latitude and the longitude of the ionospheric point. This Klobuchar model is described by eight coefficients αn, βn, and removes about 50% of the ionospheric delay at mid-latitudes. Fig 4. Improvement of the residual positionning error for Postdam with an ionospheric correction. Fig 5. Improvement of the residual positionning error for Postdam with the multipath estimation. 6. Conclusions The goal of this study is to assess the contribution of the ionosphere to the total DGPS error budget and to make this information available for DGPS users. By the described procedure, thanks to the simulator, we are able to estimate the ionospheric effect on the GNSS positionning. As we see, the effect of the ionosphere is not the only error that affects differential navigation techniques. Thanks the insertion of all the errors source, the residual error remaining after all is about two meters for a baseline of more than 600 km. C. Results Fig 2. Residual positionning error for Potsdam with and without dgps correction from Brussel. On figure 3.A, we can see the behaviour of the slant TEC for each satellite predicted by the Klobuchar model. Starting from this graph, it is not evident to deduce the effect which will result on the final positioning error. This is precisely the goal of simulated data used. In fact, the simulated data allowed to show how the individual errors (figure 3.B) “combine” in the least square process and affect the resulting computed position as we can see for the first of January 2003 in figure 3.C. If the simulated data are corrected for the ionosphere using equation 4, the residuals come back to zero, what proves that the consideration of the last equation (Eq.4) would make it possible to evaluate the effect of the ionosphere on the positions in the case of the real data. In Figure 2, we can observe an improvement of the latitude’s precision in Potsdam (in ordinate) in the course of time (in X-coordinate) thanks to the use of DGPS corrections. Acknowlegements This research project is granted by Fonds National de la Recherche Scientifique (F.N.R.S).