Gears
Gears. Gear Types. Spur Gears (90% efficiency) . Helical / Double Helical (80% efficiency). Unequal Wheel Resistance . Equal Wheel Resistance . Differential Gearing . Rack and Pinion (90% efficiency). Worm and Pinion (70% efficiency) . Epicyclic or Planetary Gears


Gears
E N D
Presentation Transcript
Gear Types Spur Gears (90% efficiency) Helical / Double Helical (80% efficiency) Unequal Wheel Resistance Equal Wheel Resistance Differential Gearing Rack and Pinion (90% efficiency) Worm and Pinion (70% efficiency) Epicyclic or Planetary Gears (80% efficiency) Bevel Gears (70% efficiency) Crown Gear
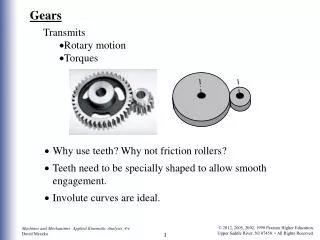
Why use Gears? • In robotics, torque is better than speed. Commercially available motors do not normally have a desirable speed to torque ratio (the main exception being servos and high torque motors with built in gearboxes). • With gears, you will exchange the high velocity with a better torque. This exchange happens with a very simple equation that you can calculate:
Gear Basics • GEAR TRAIN consists of: • Driving gears - attached to the input shaft • Driven gears - attached to the output shaft • Idler gears - interposed between the driving and driven gear in order to maintain the direction of the output shaft the same as the input shaft or to increase the distance between the drive and driven gears. Direction of Rotation – odd numbers of gears always rotates in the same direction, and even numbers of gears are counter-rotational. • GEAR RATIO is the relationship between • Number of teeth on two gears that are meshed • Two sprockets connected with a common roller chain, • Circumferences of two pulleys connected with a drive belt. • COMPOUND GEAR TRAIN refers to two or more gears used to transmit motion.
Gearing Efficiency • Unfortunately, by using gears, you lower your input to output power efficiency. This is due to obvious things such as friction, misalignment of pressure angles, lubrication, gear backlash (spacing between meshed gear teeth between two gears) and angular momentum, etc. • As you add more gears, the gearing efficiency goes down as is evident from the equation EXAMPLE: For the 6 Spur Gear Train GearRatio = Daimeter of First Gear/ Diameter of last Gear = # of Teeth on first gear / # of Teeth on last gear = 2:1 Rotational Direstion = Counter-rotational ( Since # of Gears=6 is even) effienciency_total = 0.9 ^ (5) = 59.1 % FOR EFFICIENCY, DO NOT USE LONG GEARS TRAINS. INSTEAD USE CHAIN AND SPROCKET OVER LARGER DISTANCES
Robot Speed For a 120 rpm motor, what size wheel should I use if I want my robot’s maximum speed to be 3 feet per second? For the same motor, How would I make my robot’s maximum speed 6 feet per second, if 6” wheels are the largest I can fit onto my robot? Put a gear or sprocket on the motor shaft that is half the size of the gear or sprocket on the wheel.