Download
1 / 1
10 likes | 132 Views
: cost of assigning part i to location X i : pairwise assignment cost i→X i , j→X j : 1-to-1 assignment constraint. V. Kolmogorov. Convergent tree-reweighted message passing for energy minimization. IEEE Trans. Pattern Anal. Machine Intell., 28(10):1568–1583, 2006.

E N D
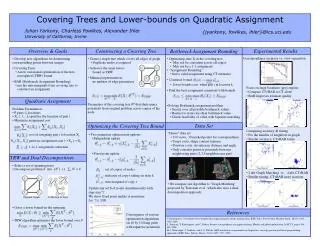
: cost of assigning part i to location Xi : pairwise assignment cost i→Xi, j→Xj : 1-to-1 assignment constraint V. Kolmogorov. Convergent tree-reweighted message passing for energy minimization. IEEE Trans. Pattern Anal. Machine Intell., 28(10):1568–1583, 2006. L. Torresani, V. Kolmogorov, and C. Rother. Feature correspondence via graph matching: Models and global optimization. In ECCV, pages 596–609, 2008. M. J. Wainwright, T. Jaakkola, and A. S. Willsky. MAP estimation via agreement on (hyper)trees: message-passing and linear programming approaches. IEEE Trans. Inform. Theory, 51(11):3697–3717, 2005. Covering Trees and Lower-bounds on Quadratic Assignment Julian Yarkony, Charless Fowlkes, Alexander Ihler University of California, Irvine {jyarkony, fowlkes, ihler}@ics.uci.edu Overview & Goals Constructing a Covering Tree Bottleneck Assignment Rounding Experimental Results • Correspondence accuracy vs. view separation • Develop new algorithms for determining corresponding points between images • Covering Trees • A new variational optimization of the tree-reweighted (TRW) bound • BAR (Bottleneck Assignment Rounding) • use the min-marginals from covering tree to construct an assignment • Create a single tree which covers all edges of graph • Duplicate nodes as required • Achieves the same lower- bound as TRW • Minimal representation; no updates of edge parameters Parameters of the covering tree µCT distribute unary potentials from original problem across copies of the node • Optimizing state X in the covering tree • May not be consistent across all copies • May not be a 1-1 assignment • “Assignment Rounding” • find a valid assignment using CT estimates • Construct bound • lower bounds cost when part i in location k • Find the best assignment consistent with bounds • Solving Bottleneck assignment problem • Search over all possible bottleneck values • Restrict to states less than bottleneck value • Check feasibility of value with bipartite matching • Focus on large baselines (grey region) • Compare CT+BAR to CT alone • BAR improves estimate quality Quadratic Assignment Problem Formulation • P parts, L locations • Xi2 1…L specifies the location of part i • Minimize assignment cost Optimizing the Covering Tree Bound Data Set • “House” data set • 110 views, 30 marked points for correspondence • Unary costs: shape context features • Pairwise costs: deviation in distance and angle • Only consider pairwise potentials between neighboring parts (2,3,4 neighbors per part) • We compare our algorithm to "Graph Matching" proposed by Toressani et al . which also uses a dual-decomposition approach. Comparing accuracy & timing • Fix the number of neighbors in graph • Similar accuracy, CT+BAR faster • Two parameter optimization updates: • Subgradient update • Fixed point update TRW and Dual Decomposition: • Select a set of spanning trees • Decompose problem µ into {µT} s.t. åTµT = µ • Gives a lower bound on the optimum • TRW algorithm optimizes the lower bound over µ : set of copies of node i : indicator of copy t taking on state k : min-marginal of copy t • 2 nbr Graph Matching vs. 4 nbr CT+BAR • Similar timing, CT+BAR more accurate Update any set S of nodes simultaneously with step-size We show fixed point update is monotone for · 1/|S| Collection of trees Original Graph References Convergence of various optimization algorithms on 10 by 10 Ising grids with repulsive potentials