Download
1 / 14
140 likes | 339 Views
Lifetimes at DESY. Mark Lomperski DESY-MIN. 2.December.04. Status (Part 1). One Algorithm used at DORIS, PETRA-e and PETRA-p, HERA-e and HERA-p: e+/e- tau ~20 hrs, p+ tau > 1000 hrs Keeps most of the people happy most of the time…. but not all the time…

E N D
Lifetimes at DESY Mark Lomperski DESY-MIN 2.December.04
Status (Part 1) • One Algorithm used at DORIS, PETRA-e and PETRA-p, HERA-e and HERA-p: e+/e- tau ~20 hrs, p+ tau > 1000 hrs • Keeps most of the people happy most of the time…. but not all the time… • “Is the lifetime suddenly increasing?”No, those are just the normal oscillations in tau… • “Is the lifetime STILL bad?”No, just wait for the slow tau-calculation to get a grip….
Status (Part 2) • All lifetimes are based on DCCT currents. • Average Joe-User often needs to resort to the measured current to figure out if the value for tau is reasonable. • Fast info on the proton lifetime is taken from loss monitors.(After tweaking the machine, watching the loss rates, you can sit back and wait for tau to reflect the changes, or maybe not…)
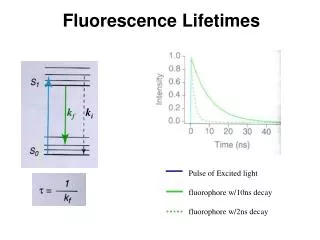
Desired Improvements • Smoother value under constant beam conditions • Quick reacting (instantaneous) Accurately follow the time dependence of lifetime disturbances! With a small STATISTICAL error, please. The “problem” (lifetime breakdown) may be solved, but the tau algorithm can take too much time (>20 s) to reveal this.
Slow Tau Response, losing 50 uA HERA-e ramp from 12 to 27.5 GeV Start with 27 mA & 18 hr. Lose ~50 uA in 20 sec – twice. Tau drops to 4 hrs. End at 26.5 mA
Progress with Tau Calcs • Attempts at a tau in 0.5 sec (or what we learned which helped explain why things are so difficult) • The Standard Algorithm (W.Schuette, PAC ’93) • Something New, Something Different
A DCCT Tau in 0.5 Sec • Set-up HP3458A DVM for > 10000 points in 0.5 sec. RMS < 10 uA. Fit a line to the data. Make 1000 meas. The RMS of the 1000 calculated loss rates is 5 to 10x GREATER than the statistical error in each fit. (With a Voltage-Source, the two results are consistent). • Low Frequency “noise”, drifts (K.Knaack). • The dI/dT “drifts” in 0.5 sec are large compared to size of lifetime effects we wish to measure (~ uA/sec). • Conclusion: “Integrate” over many seconds to smooth out “drifts”. Need to detect real-losses, and to not mix-up “drifts” with real-losses (and vice-versa).
The Standard Algorithm. 1 • W.Schuette, described in ’93 PAC. • Data at a few Hz, keeping history, Least-Squares Fit to get loss rate. • The Decision: How far back in the history should be used for the fit? • Inspect single measurements; stop if • I(i) – I(i-1) > Delta_I_Max (~40 uA) • Loss(i)-Loss(i-1) > Delta_Loss_Max (~0.1%/sec)
The Standard Algorithm. 2. • Problem: Delta_I_Max large enough that”drifts” are not a problem, but some sudden changes in loss rate are not detected, (depth in history not shortened), and sudden drop looks looks a salad-bowl. • Attempts to Tune Parameters: Not satisfying. Making it more “sensitive”, it then reacts on “drifts” (shortening the buffer with result that the loss rate results are unstable).
Something New, Something Different • Informal discussion with Alan Fisher (SLAC) on Fun with DCCTs (DVMs, integration times) • Their algorithm (what I understood): if Chi^2 value is greater than a set limit, then shorten the history buffer. • Less sensitive to “drifts”? (Chi^2 over long time not effected by small/short errors?)
Comparing Algorithms, Parameters Store “raw” data for offline analysis Add well-defined lifetime “events” to the data (lifetime breakdowns, beam loss, noise-spikes,…) 30 minutes of DORIS Data. Lifetime ~12 hours
Standard vs Chi^2 Algorithms Standard Algorithm: breakdown not detected (so history-depth not shortened) Chi^2 Algorithm: No effect until ~3 sec after event. Then quick reaction.
Other comparisons • Significant beam-losses are easy to find • Small noise spikes which are not seem in Standard can wreak chaos in Chi^2. • Next Step: Filtering the data…? Suggestion by O.Kaul DORIS: Causal Filters (He uses one for his Orbit-Stabilization Algorithm).
Summary A lifetime measurement with real-time response is needed. Low frequency DCCT noise (drifts?) makes a simple/direct solution, well, difficult. It is necessary to average over many seconds. Our Standard Algorithm, which compares individual currents, is blind to small effects. We’ve started work on Other Algorithms.