Download
1 / 1
10 likes | 116 Views
Explore the use of critically damped and Butterworth filters to analyze motion data in biomechanics, focusing on the acceleration of a falling object—a golf ball. Results show the critically damped filter outperforms the Butterworth filter in predicting accurate acceleration values. Higher-order Butterworth filters cause distortion during rapid transitions. Caution should be taken with Butterworth filters for higher-order filtering to avoid signal distortion.

E N D
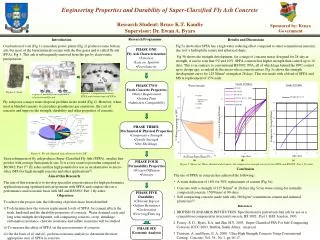
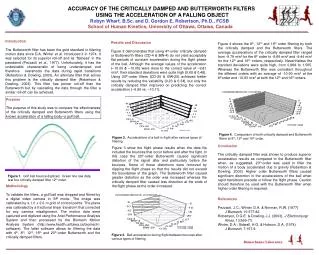
Methodology To validate the filters, a golf ball was dropped and filmed by a digital video camera in SP mode. The image was calibrated by a 1.0 x 2.0 m grid of control points. The plane was calibrated by a fractional linear transform that corrected for any camera misalignment. The motion data were captured and digitized using the Ariel Performance Analysis System and then processed by the Biomech Motion Analysis System (http://www.health.uottawa.ca/biomech/-software). The latter software allows for filtering the data with 4th, 8th, 12th, 16th and 20th-order Butterworth and the critically damped filters. Figure 4. Comparison of both critically damped and Butterworth filters at 8th, 12th and 16th order. Figure 2. Accelerations of a ball in flight after various types of filtering Figure 1. Golf ball bounce digitized. Green line raw data, teal line critically damped filter 12th order. Biomechanics Laboratory • ACCURACY OF THE CRITICALLY DAMPED AND BUTTERWORTH FILTERS • USING THE ACCELERATION OF A FALLING OBJECT • Robyn Wharf, B.Sc. and D. Gordon E. Robertson, Ph.D., FCSB • School of Human Kinetics, University of Ottawa, Ottawa, Canada Introduction The Butterworth filter has been the gold standard in filtering motion data since D.A. Winter et al. introduced it in 1974. It was selected for its superior roll-off and its “flatness” in the passband (Pezzack et al., 1977). Unfortunately, it has the undesirable characteristic of being underdamped and therefore overshoots the data during rapid transitions (Robertson & Dowling, 2003). An alternate filter that solves this problem is the critically damped filter (Robertson & Dowling, 2003). This filter has poorer roll-off than the Butterworth but by cascading the data through the filter a similar roll-off can be achieved. Results and Discussion Figure 2 demonstrates that using 4th-order critically damped or Butterworth filters (CD-4 & BW-4) do not yield acceptably flat periods of constant acceleration during the flight phase of the ball. Although the average values of the acceleration (–10.00 & –10.05) were close to the correct value of –9.81 m/s2, their standard deviations were quite high (0.69 & 0.48). Using 20th-order filters (CD-20 & BW-20) achieved better results by reducing the variability (0.23 & 0.34), but only the critically damped filter improved on predicting the correct acceleration (–9.96 vs. –10.11). Figure 4 shows the 8th, 12th and 16th order filtering by both the critically damped and the Butterworth filters. The average accelerations of the critically damped filter ranged from -9.79 m/s2 for the 8th order to -9.66 m/s2 and -9.44 m/s2 for the 12th and 16th orders, respectively. Nevertheless the standard deviations were quite high, from 0.969 to 1.505. Whereas the Butterworth filter was consistent throughout the different orders with an average of -10.90 m/s2 at the 8thorder and -10.93 m/s2 at both the 12th and 16th orders. Purpose The purpose of this study was to compare the effectiveness of the critically damped and Butterworth filters using the known acceleration of a falling body–a golf ball. Conclusion The critically damped filter was shown to produce superioracceleration results as compared to the Butterworth filter when, as suggested, 20th-order was used to filter the motion of a body accelerated due to gravity (Robertson & Dowling, 2003). Higher order Butterworth filters caused significant distortion in the accelerations of the ball when rapid transitions precede or follow the flight phase. Caution should therefore be used with the Butterworth filter when higher order filtering is required. Figure 3 show the flight phase results when the data file included the bounces that occur before and after the fight. In this case the 20th-order Butterworth caused significant distortion of the signal after and particularly before the bounces. Some of these distortions were removed by clipping the flight phase so that the results did not exceed the boundaries of the graph. The Butterworth filter caused greater distortion as the order was increased whereas the critically damped filter caused less distortion at the ends of the flight phase as the order increased. References Pezzack, J.C.; Winter, D.A. & Norman, R.W. (1977) J Biomech, 10:377-82. Robertson, D.G.E. & Dowling, J.J. (2003). J Electromyogr Kines, 13:569-73. Winter, D.A.; Sidwall, H.G. & Hobson, D.A. (1974) J Biomech, 7:157-9. Figure 3. Ball acceleration during flight between bounces after various types of filtering