Download
1 / 11
110 likes | 279 Views
Laurence Boxer. Even faster point set pattern matching in 3-d. Niagara University and SUNY - Buffalo. boxer@niagara.edu Research partially supported by a grant from the Niagara University Research Council. The problem:. Given a pattern set P and a sample set S in

E N D
Laurence Boxer Even faster point set pattern matching in 3-d Niagara University and SUNY - Buffalo boxer@niagara.edu Research partially supported by a grant from the Niagara University Research Council SPIE Vision Geometry - July '99
The problem: Given a pattern set P and a sample set S in with , identify all subsets of S that are congruent to P. SPIE Vision Geometry - July '99
History - 1 • P.J. de Rezende & D.T. Lee, Point set pattern matching in d dimensions, Algorithmica 13 (1995): • running time SPIE Vision Geometry - July '99
History - 2 L. Boxer, Point set pattern matching in 3-D, Pattern Recognition Letters 17 (1996): Running time Key to improved running time: derivation of smaller upper bound on output, based on upper bound for # of segments of same length in S, due to Clarkson, et al., Combinatorial complexity bounds for arrangements of curves and surfaces, Discrete & Computational Geometry 5 (1990). Output bound: SPIE Vision Geometry - July '99
Current paper Running time: Improved running time due to derivation of yet smaller upper bound on output, from upper bound on triangles in S, in T. Akutsu et al., Distributions of distances and triangles in a point set and algorithms for computing the largest commonpoint sets, Discrete & Computational Geometry 20 (1998). Output bound: SPIE Vision Geometry - July '99
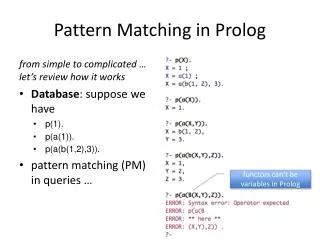
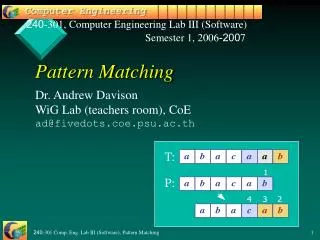
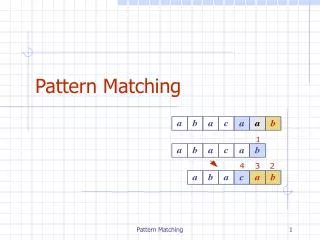
Sketch of algorithm - 1 1. Sort S lexicographically. 4. For each T’, compute the (at most constant # of) rigid transformations f such that f(T)=T’. 2. Determine whether P is collinear. If so, handle via special (faster) algorithm for this case. If not, note a non-collinear triple T in P. 3. Find each triple T’ in S that matches T. Avoid considering all triples by forming line segments, sorting by length & endpoints, searching. SPIE Vision Geometry - July '99
Sketch of algorithm - 2 5. For each rigid transformation f, compute the set f(P\T) and for each of its members f(p), determine by binary search if in S. If all f(p) in S, f determines a matching. 6. Different transformations f may determine the same matching subset of S. To eliminate duplicates, sort all individual matchings lexicographically, then sort the collection of matchings lexicographically, then apply a prefix operation to remove each matching that equals its predecessor on the sorted list. SPIE Vision Geometry - July '99
Related problem: similar matching • The problem: find all subsets P’ of S that are similar to P. • Algorithm is similar to that for congruent version of problem. • Upper bound on output (also due to result of Akutsu et al.) is greater than for congruent version. • Running time: SPIE Vision Geometry - July '99
Related problem: congruent copy detection (CCD) • The problem: find some congruent copy P’ of P in S • Note any solution to PSPM Problem solves CCD. • Therefore our solution to PSPM Problem gives (slight) improvement on solution to CCD in Akutsu et al. SPIE Vision Geometry - July '99
Efficient parallel solutions on CGM • Ideal: Speedup linear in p (= # of processors) • In practice: Often must introduce sorts for global data communications • PSPM (congruences): • PSPM (similarities): SPIE Vision Geometry - July '99
Further work: • There is a gap between the best upper bound and the best lower bound known for the output. Narrowing the gap would improve our knowledge of this problem, and perhaps running times. • Lower bound for worst case output: SPIE Vision Geometry - July '99