
Dean Petters
E N D
Presentation Transcript
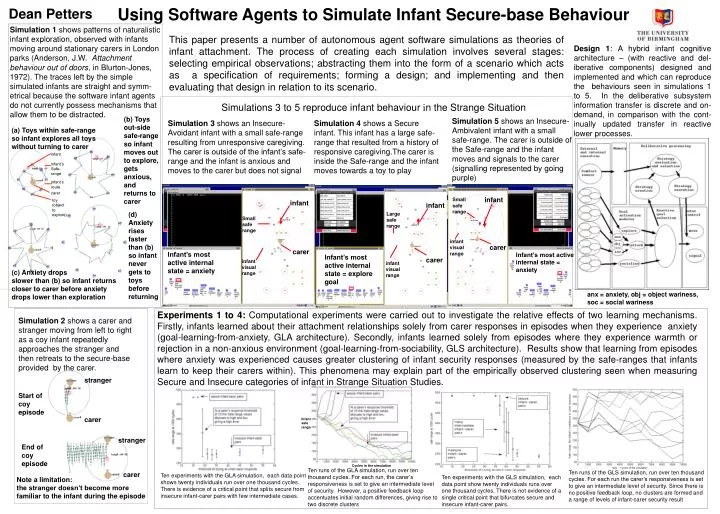
Dean Petters Using Software Agents to Simulate Infant Secure-base Behaviour Simulation 1 shows patterns of naturalistic infant exploration, observed with infants moving around stationary carers in London parks (Anderson, J.W. Attachment behaviour out of doors, in Blurton-Jones, 1972). The traces left by the simple simulated infants are straight and symm-etrical because the software infant agents do not currently possess mechanisms that allow them to be distracted. This paper presents a number of autonomous agent software simulations as theories of infant attachment. The process of creating each simulation involves several stages: selecting empirical observations; abstracting them into the form of a scenario which acts as a specification of requirements; forming a design; and implementing and then evaluating that design in relation to its scenario. Design 1: A hybrid infant cognitive architecture – (with reactive and del-iberative components) designed and implemented and which can reproduce the behaviours seen in simulations 1 to 5. In the deliberative subsystem information transfer is discrete and on-demand, in comparison with the cont-inually updated transfer in reactive lower processes. Simulations 3 to 5 reproduce infant behaviour in the Strange Situation (b) Toys out-side safe-range so infant moves out to explore, gets anxious, and returns to carer Simulation 5 shows an Insecure-Ambivalent infant with a small safe-range. The carer is outside of the Safe-range and the infant moves and signals to the carer (signalling represented by going purple) Simulation 3 shows an Insecure-Avoidant infant with a small safe-range resulting from unresponsive caregiving. The carer is outside of the infant’s safe-range and the infant is anxious and moves to the carer but does not signal Simulation 4 shows a Secure infant. This infant has a large safe-range that resulted from a history of responsive caregiving.The carer is inside the Safe-range and the infant moves towards a toy to play (a) Toys within safe-range so infant explores all toys without turning to carer infant infant’s Safe- range infant’s route carer infant Small safe range toy (object to explore) infant infant (d) Anxiety rises faster than (b) so infant never gets to toys before returning Large safe range Small safe range infantvisual range carer carer Infant’s most active internal state = anxiety Infant’s most active internal state = anxiety Infant’s most active internal state = explore goal carer infantvisual range infantvisual range (c) Anxiety drops slower than (b) so infant returns closer to carer before anxiety drops lower than exploration anx = anxiety, obj = object wariness, soc = social wariness Experiments 1 to 4: Computational experiments were carried out to investigate the relative effects of two learning mechanisms. Firstly, infants learned about their attachment relationships solely from carer responses in episodes when they experience anxiety (goal-learning-from-anxiety, GLA architecture). Secondly, infants learned solely from episodes where they experience warmth or rejection in a non-anxious environment (goal-learning-from-sociability, GLS architecture). Results show that learning from episodes where anxiety was experienced causes greater clustering of infant security responses (measured by the safe-ranges that infants learn to keep their carers within). This phenomena may explain part of the empirically observed clustering seen when measuring Secure and Insecure categories of infant in Strange Situation Studies. Simulation 2 shows a carer and stranger moving from left to right as a coy infant repeatedly approaches the stranger and then retreats to the secure-base provided by the carer. stranger Start of coy episode carer Infant safe range stranger End of coy episode Cycles in the simulation Ten runs of the GLA simulation, run over ten thousand cycles. For each run, the carer’s responsiveness is set to give an intermediate level of security. However, a positive feedback loop accentuates initial random differences, giving rise to two discrete clusters Ten runs of the GLS simulation, run over ten thousand cycles. For each run the carer’s responsiveness is set to give an intermediate level of security. Since there is no positive feedback loop, no clusters are formed and a range of levels of infant-carer security result carer Ten experiments with the GLA simulation, each data point shows twenty individuals run over one thousand cycles. There is evidence of a critical point that splits secure from insecure infant-carer pairs with few intermediate cases. Ten experiments with the GLS simulation, each data point show twenty individuals runs over one thousand cycles. There is not evidence of a single critical point that bifurcates secure and insecure infant-carer pairs. Note a limitation: the stranger doesn’t become more familiar to the infant during the episode