Object Localization by Efficient Subwindow Search
Object Localization by Efficient Subwindow Search. JOJO 2010.12.9. Outline. Background Paper Research background Sliding Window Approach Efficient Subwindow Search (ESS) Branch-and-Bound Search Application Experiment (Car Detection) Data & Algorithm Experiment design Conclusion.

Object Localization by Efficient Subwindow Search
E N D
Presentation Transcript
Object Localization by Efficient Subwindow Search JOJO 2010.12.9
Outline • Background • Paper • Research background • Sliding Window Approach • Efficient Subwindow Search (ESS) • Branch-and-Bound Search • Application • Experiment (Car Detection) • Data & Algorithm • Experiment design • Conclusion
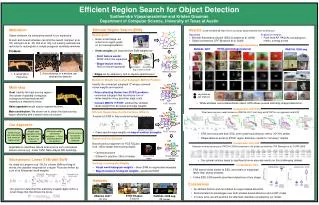
Background (Paper) • Title: Beyond Sliding Windows: Object Localization by Efficient Subwindow Search • Author: Christoph H. Lampert • Source: IEEE International Conference on Computer Vision and Pattern Recogniton,2008
Background (Research background) • Object recognition systems: only decide if the object is present or not not provide the actual object location. • Sliding window approach (previous localiza-tion method): Computational cost is seriously expensive
Outline • Background • Paper • Research background • Sliding Window Approach • Efficient Subwindow Search (ESS) • Branch-and-Bound Search • Application • Experiment (Car Detection) • Data & Algorithm • Experiment design • Conclusion
Sliding Window Approach • Target: Find a bounding box around the object • Tool: Quality function • Perform:
Sliding Window Approach • All rectangular regions • The image • Quality function
Sliding Window Approach • Time Complexity: • must be smooth and slowly varying • Local optimally ESS
Outline • Background • Paper • Research background • Sliding Window Approach • Efficient Subwindow Search (ESS) • Branch-and-Bound Search • Application • Experiment (Car Detection) • Data & Algorithm • Experiment design • Conclusion
ESS (Branch-and-Bound Search) Set of rectangles
ESS (Application) • Localization of non-rigid objects (animals) • Localization of rigid objects (car) • Image part retrieval
Outline • Background • Paper • Research background • Sliding Window Approach • Efficient Subwindow Search (ESS) • Branch-and-Bound Search • Application • Experiment (Car Detection) • Data & Algorithm • Experiment design • Conclusion
Experiment (Car Detection) • Data UIUC Car dataset • Algorithm
Experiment (Car Detection) 1 SVM: • Linear kernel • Feature: Grid_based SURF extracted the SURF features from regular grids of size 4x4 to 40x40. • Hierarchical spatial pyramid histograms Speeded up robust feature
Experiment (Car Detection) SVM: • Hierarchical spatial pyramid histograms
Experiment (Car Detection) 1 SVM: • Hierarchical spatial pyramid histograms The number of pyramid levels vary between 1 and 10
Experiment (Car Detection) 2 Decision function:
Experiment (Car Detection) 3 Upper bound function :
Experiment (Car Detection) Experiment design Error rates on UIUC Cars dataset at the point of equal precision and recall.
Outline • Background • Paper • Research background • Sliding Window Approach • Efficient Subwindow Search (ESS) • Branch-and-Bound Search • Application • Experiment (Car Detection) • Data & Algorithm • Experiment design • Conclusion
Conclusion • Advantage: fast global optimally better local classifier (SVM) more choices of f • Future work: other kernel-based classifier other parametric shape (circle, ellipse)