Download
1 / 25
250 likes | 420 Views
A body 'm' having relative plane motion with a reference body 'n' is shown in figure. A and B are two points on body 'm'. Absolute velocity vectors of points A and B relative to body 'n' are known.

E N D
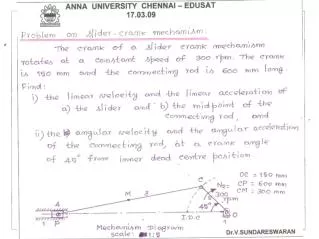
A body 'm' having relative plane motion with a reference body 'n' is shown in figure. • A and B are two points on body 'm'. • Absolute velocity vectors of points A and B relative to body 'n' are known. • Let P be the point at the intersection of lines from A and B, perpendicular, respectively to VA and VB. • Absolute velocity vector equation for point P can be written with respect to points A and B as • VP = VA +VPA ---(1) VP = VB +VPB ---(2)
Now, since VA and VPA are each perpendicular to line PA, VP must also be perpendicular to PA. • Similarly, since VB and VPB are each perpendicular to line PB, VP must also be perpendicular to PB. • This is a contradiction: VP cannot, in general, be perpendicular to both lines PA and PB. • What does this Mean ? • The apparent contradiction is resolved if VP = 0 -----(3) • Point P is called an Instantaneous centre of rotation ( or instant centre, instaneous centre of zero velocity, rotopole, centro)
One of its properties is now clear. ie., If two bodies are having relative plane motion, the instant centre is the point at which they are relatively at rest. • Substiuting, VP = 0, in Equations (1) and (2), then VA = - VPA = VAP VB = - VPB = VBP • But, VAP = ω x AP and VBP = ω x BP • Hence, VA = ω x AP -----(4) VB = ω x BP -----(5) and (VA / VB ) = (AP / BP ) --------(6)
Equations (4) and (5) reveal the second basic property of an instant centre. At the instant, the two bodies may be regarded as having relative rotation about the instant centre. • In summary, the basic properties of instant centre are: 1. Instant centre is the point at which the two bodies having relative plane motion are relatively at rest. 2. Instant centre is the point about which the bodies are rotating relative to one another at the instant.
The Aronhold-Kennedy Theorem • The Aronhold-Kennedy Theorem also known as Kennedy Theorem or Kennedy Rule, states: • If three bodies have relative plane motion, they have three instant centers which lie on the same straight line. • Proof: • The three bodies having relative plane motion have three instant centers: N = 3(3-1)/2 = 3. It remains to prove that they lie on the same straight line.
There are three bodies having relative plane motion. The locations of instant centers 12 and 13 are known. It is to be proved that 23 lies on the line 12-13. This will be done by showing that to assume it does not lie on the line leads to a contradiction.
A position for 23 has been assumed off line 12-13. Now regarding point 23 as on body 2, • V23 is perpendicular to 12-23 • Regarding 23 on body 3, • V23 is perpendicular to 12-23
But it follows from the properties of an instant center that the velocity of the instant center for two bodies relative to a third is the same whether regarded as a point on the first or on the second. • The velocity of 23 cannot be perpendicular to both 12-23 and 13-23 unless the poiny 23 lies on the line 12-13.
Locating Instant Centers • The following rules are used in locating instant centers: • If two links are connected by a pivot joint, the center of the pivot is their instant center. • If two links have pure rolling contact, the point of contact is their instant center. • If two links have sliding contact, their instant center is along the common normal at the point of contact. • The three instant centers for any three links having relative plane motion lie on the same straight line.