Download
1 / 17

E N D
2. Problem Two layers (Bg and Fg)
Scenarios: video-conferencing, live bluescreening without bluescreen
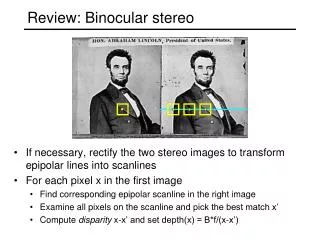
Two cameras
Background may not be static
Goal: accurately segment foreground object in real-time
Applications: background substitution, ...
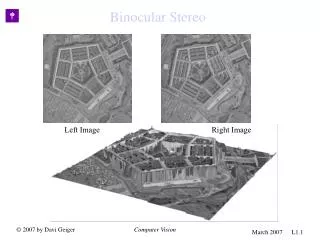
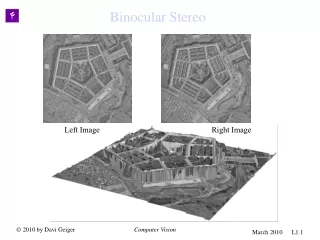
3. Sources of information Stereo
Foreground object has larger disparity
Colour
Background and foreground have distinct colour distributions
Contrast
There is image gradient at Bg/Fg transition
Spatial coherence
MRF model live demo...live demo...
4. Previous work Colour/Contrast (+2D coherence)
Graph cuts
(Boykov et al. �01, Rother et al. �04)
5. Fusing colour/contrast and stereo Colour and stereo complement each other
Result from fusion:
6. Ideally: Fusing colour/contrast and stereo
7. Approximations Simplify the model to get real-time performance
Two different approaches:
Layered Dynamic Programming (LDP)
Layered Graph Cut (LGC)
Probabilistic formulation
Parameters can mostly be set automatically
Very similar error statistics
Consistently better than colour/contrast or stereo alone probabilistic formulation aids fusion of different cuesprobabilistic formulation aids fusion of different cues
8. Layered Dynamic Programming (LDP) Approximation: in the prior neglect coupling between scanlines
9. Layered Graph Cut (LGC) Approximation: in the prior neglect conditioning of disparity dp on disparities of neighbours
conditioned only on segmentation label xp?{Bg,Fg,Occ}
Marginalise disparities out
Energy minimisation problem with 3 labels
Solve it using 2 graph cut computations
Approx. 20 frames per second (320 x 240, 3GHz)
10. Setting parameters Two approaches:
Generative: from physics (e.g. from average width of occluded regions)
Discriminative: minimize error rates
Consistent results!
See technical report 2005 (http://research.microsoft.com/vision/cambridge/i2i/)
11. Experiments: ground truth data 19 calibrated stereo sequences
6 with ground truth segmentation
Every 5th or 10th frame
Pixels marked as �Bg�, �Fg� or �Unknown�
12. Accuracy of segmentation
13. Accuracy of segmentation
14. Accuracy of segmentation
15. Conclusion Two algorithms based on different approximations
Fuse colour/constrast, stereo, and spatial coherence
Probabilistic formulation
Capable of real-time performance
Similar error statistics
Consistently better than state-of-the art techniques
Different characteristics
LDP: Parallelisable (scanlines processed independently)
LGC: Marginalisation could be done on GPU
MSN: i2i cambridge
17. Segmentation errors (LGC)
18. Segmentation errors (LGC)