Download
1 / 61
610 likes | 626 Views
Client Iowa State University Department of Electrical and Computer Engineering. Advisors Dr. John Lamont Professor Ralph Patterson III. Ongo-03 Micro-CART Micro processor- C ontrolled A erial R obotics T eam. Team Members 2 nd Semester 1 st Semester

E N D
Client Iowa State University Department of Electrical and Computer Engineering Advisors Dr. John Lamont Professor Ralph Patterson III Ongo-03 Micro-CARTMicroprocessor-Controlled Aerial Robotics Team Team Members 2nd Semester 1st Semester Greg Elliott (Team Leader) Stephanie Berhow David Stulken Ross Eisenbeis Dylan Connor Arvin Gandha Ryan D’Acquisto Interdisciplinary Members Preethi Prabhakar Wail Eltingari Andy Cook (ME) Andrew Riha Philip Haubrich Andrew Nahra (ME) Steven Walstrom Richard Jahn
Presentation outline • Definitions • Acknowledgement • Problem statement • Operating environment • Intended users and uses • Assumptions and limitations • End product requirements • Project activity • Previous accomplishments • Present accomplishments • Future required activities • Approaches considered • Project definition activities • Research activities • Design activities • Implementations activities • Testing activities • Resources and schedules • Project evaluation • Commercialization • Suggestions for future work • Lessons learned • Risks and risk management • Closing summary
Acronym definitions Attitude The orientation of an aircraft's axes relative to a reference line or plane, such as the horizon AUVSI Association for Unmanned Vehicle Systems International FMC Flight mission capable GPS Global positioning system GSS Ground station system IARC International Aerial Robotics Competition IMU Inertial measurement unit OS Operating system PC-104+ Intel x86-based controllable board PIC Programmable interface controller Pitch Revolution of a vehicle forward and backward on a central axis PWM Pulse width modulation RC Remote control Roll Revolution around the longitudinal axis of a vehicle UAV Unmanned aerial vehicle UPS Uninterruptible power supply WIKI (What I Know Is) A public documentation repository Yaw Revolution around the vertical axis of a vehicle
Acknowledgement Iowa State University’s Microprocessor-Controlled Aerial Robotics Team would like to give special thanks to the following people and organizations for their assistance: Professor John W Lamont and Assistant Professor Ralph Patterson III for sharing their professional experience and guidance throughout the course of this project. Lockheed Martin Corporation for their technical expertise and generous financial contribution to this costly endeavor. Without their assistance this project would not be possible. The Department of Electrical and Computer Engineering for creating Micro-CART and providing the skills and knowledge required for this project. Eric Frana for volunteering his time to help out the team, everyone learned a great deal from his involvement this semester.
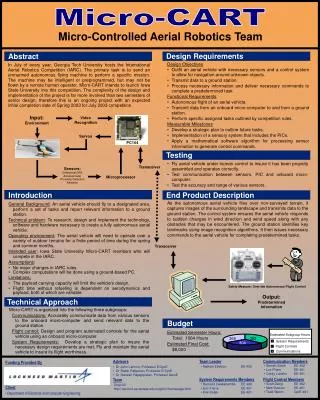
Problem statement • General Problem Statement • To provide an entry for Iowa State University into the International Aerial Robotics Competition (IARC) in July 2006 • General Solution Approach • Fulfill only level 1 competition requirements • Use an RC X-Cell Gas Graphite Helicopter for an aerial vehicle • Initial system components • Sonar array • IMU • GPS unit • Digital magnetic compass • Wireless modem • PC-104+ embedded system • Battery power supply
Operating environment • IARC as an evolving event • Diverse outdoor landscape and handle some obstacles defined by the competition mission. • Temperature threshold (60o-100o) • No extreme environments, e.g. fog, rain, etc. • Possible wind, light precipitation, adverse topography of the competition location.
Intended User (s) • Initial users Current first-semester team members of Micro-CART (Spring 2006 team) • Intended users • Future Micro-CART teams • Researchers • Industry representatives • Farmers • Hobbyist
Intended Use (s) • Initial use Entry into Summer 2006 IARC • Future use • Search and rescue • Military and law enforcement reconnaissance • Crop dusting • Environmental catastrophe control
Assumptions and Limitations • Assumptions • IARC Mission rules may change after 2006 • Necessary funding remains available • Onboard computing systems will be sufficient • Current vehicle is able to carry necessary equipment • Limitations • Competition Requirements • Physical limits of helicopter • Helicopter maintenance • Power consumption limits • Team member expertise
End product Requirements • IARC Level 1 Autonomous Functionality • Take off • Navigate to five waypoints with the fifth located three kilometers away • Maintain a stable hover at the fifth waypoint • Allow Future Modification for More Advanced Functionality • Image Recognition • Obstacle Avoidance • Secondary Vehicle Deployment Systems
Presentation outline • Definitions • Acknowledgement • Problem statement • Operating environment • Intended users and uses • Assumptions and limitations • End product requirements • Project activity • Previous accomplishments • Present accomplishments • Future required activities • Approaches considered • Project definition activities • Research activities • Design activities • Implementation Activities • Testing Activities • Resources and schedules • Project evaluation • Commercialization • Suggestions for future work • Lessons learned • Risks and risk management • Closing summary
Project Activity • Previous Accomplishments • Purchased helicopter • Acquired all components • System design exceeded max lift capacity • Present Accomplishments • Weight reduction • Refine components and documentation • Future Required Activities • Testing
Previous Accomplishments • Fall 1999 • Purchased RC helicopter • Purchased Dell PC • Fall 2000 - 2003 • Pilot training program • Spring 2002 • Acquired security box • Fall 2002 • Acquired and setup Linux PC • Sonar circuit design • Complete PIC programming for serial interfacing • Fall 2002 – Spring 2003 • Hardware acquisitions • Serial software development • PIC programming • PC-104+ operating system • Spring 2003 • Power system • Mounting platform • Manual override switch • Fall 2004 • Replace PC-104+ • Spring 2005 • Acquired Wireless Data-link • Acquired Magnetic Compass Completed design Spring 2005 - Exceeded 14lb. lift capacity
Present Accomplishments • Fall 2005 • WIKI • Hardware enclosure • New head block • Flight test stand • Flight testing • Onboard payload limitations
Future required activities • Fall 2005 to Project End • Flight control software review and improvement • Sensor review and improvement • IARC level 2 solution • Flight testing and maintenance • Additional funding • Thorough project documentation
Project definition activities • Fall 2005: New definition activities: • Helicopter flight test stand • Online documentation System - All else is as previously defined (ongoing project)
Definition – Test Stand • Test Stands Considered: • Traditional Pivoting Arm (Selected) • Advantages: Proven design, locally available, reasonable cost • Disadvantages: Requires modification, not true full range of motion (can only move about a circular path) • Suspended Platform (Rejected) • Advantages: Less modification needed, full freedom of motion • Disadvantages: Need to import from UK, requires flat surface (such as a parking lot)
Definition - Documentation • Alternative documentation methods considered: • CVS: Concurrent Versioning System (Rejected) • Advantages: Simple setup, many utilities available, already used for code • Disadvantages: Not user friendly, requires selective downloading, slow turnaround • WIKI (Selected) • Advantages: Extremely easy, no software required (web interface), fast turnaround • Disadvantages: Not downloadable, harder to backup
Research activities • Fall 2005: New Research Activities • Weight Problem • Enclosure redesign • Landing gear replacement • Possible IMU replacement • Possible GPS replacement • Worn/Damaged/Failed Equipment • Helicopter head & flybar • Possible GPS replacement • Flight test stand • Documentation Effort • Associated research
Research - Enclosure • Material Change • Previous- Lexan: Heavy, too thick, and has static electricity problems, but is easy to work with • Current- Carbon Fiber: Much lighter & stronger, but harder to work with and is more expensive • Coverage • Previous- Fully enclosed to protect equipment • Current- Open (mounting plate only), easier to work on, but doesn’t protect equipment
Research – Landing Gear • Previous custom landing gear was purpose designed around old enclosure • Current layout of equipment (long and flat) makes old landing gear excessively large • Helicopter’s original stock landing gear is now again usable (with appropriate standoffs)
Research - IMU • System is heavy, and at 1.4 lbs, current IMU is one of the heaviest components • Alternatives have been found that are as light as 29 g (0.064 lbs) • Hardware changes would require a lot of software changes
Research – Helicopter Blades • Alternative to decreasing weight: Increase lift • Longer blades of different airfoil shape recommended • Would require longer tail boom
Research – Head & Flybar • Helicopter repairs necessary after last summer • Plastic head replaced with stronger aluminum version • Alternate head would accept longer blades if used in the future • Flybar replaced
Research - GPS • Current GPS • Possibly non-functional • Three-part system (GPS board, interface board, antenna) • Many cables required (power, serial, interface, antenna coax) • Alternate GPS • Single-part system (GPS & antenna together) • Single USB cable for both power and data • Would require software changes
Research – Test Stand • Continual helicopter damage prevents system testing & delays project • Autonomous system difficult to test without actually flying • Flight test stand can allow helicopter to fly without as much danger of damage • Useful for both autonomous testing & human pilot training
Research - Documentation • Previous documentation very poor • Poor transfer of knowledge from semester to semester • Much time wasted repeating research • Hard to get new students up to speed • WIKI devised • Instantly visible updates • Single documentation source • Viewable/editable from any PC on the internet • Tracks changes, easy to revert • Results • More time spent re-researching almost every system, but beyond this semester, it will be well organized and easily accessable
Presentation outline • Definitions • Acknowledgement • Problem statement • Operating environment • Intended users and uses • Assumptions and limitations • End product requirements • Project activity • Previous accomplishments • Present accomplishments • Future required activities • Approaches considered • Project definition activities • Research activities • Design activities • Implementations activities • Testing activities • Resources and schedules • Project evaluation • Commercialization • Suggestions for future work • Lessons learned • Risks and risk management • Closing summary
Design activities Enclosure Fabrication • Carbon fiber composite board • Mounted with aluminum stands • Location and mounting of components
Flight Test Stand Modification • Current cradle too small • Need to widen mounting mechanism • The test stand would need to be cut and re-welded in 5 locations
Wiki Design Data loss is a serious issue for all on going teams. A repository is needed with the following traits: • Centralized • Secure • Easily accessed • Easily updated
Presentation outline • Definitions • Acknowledgement • Problem statement • Operating environment • Intended users and uses • Assumptions and limitations • End product requirements • Project activity • Previous accomplishments • Present accomplishments • Future required activities • Approaches considered • Project definition activities • Research activities • Design activities • Implementation Activities • Current testing • Resources and schedules • Project evaluation • Commercialization • Suggestions for future work • Lessons learned • Risks and risk management • Closing summary
Implementation activities • WIKI • Ground Station System • Sonar Array • Flight Stand • Enclosure • Landing Gear • Helicopter Maintenance and Repair
WIKI Implementation • Objective: to document everything we knew about MicroCART • Electronically capture all information in old lab journals • Taking pictures of components
Ground Station Implementation • Testing of each module (written in Java) to verify that all data is processed properly • Testing involves using the GUI
Sonar Array Implementation • Main board design was revised • New custom PCB is being fabricated • Greater use of connectors instead of soldered-to- board wires
Flight Stand Implementation • Purchased and assembled • Modification is in progress to interface our helicopter with this stand
Enclosure Implementation • New carbon fiber composite • Dimensions must still be determined • Minimum size with adequate strength
Landing Gear Implementation • Last year’s design is overkill • Now, use the original landing gear with aluminum extensions
Helicopter Maintenance and Repair Implementation • New aluminum head-block replaced old plastic one • Servos and linkages re-calibrated • Engine re-tuned, choke adjusted, screws replaced • Flight tests
Presentation outline • Definitions • Acknowledgement • Problem statement • Operating environment • Intended users and uses • Assumptions and limitations • End product requirements • Project activity • Previous accomplishments • Present accomplishments • Future required activities • Approaches considered • Project definition activities • Research activities • Design activities • Implementations activities • Testing activities • Resources and schedules • Project evaluation • Commercialization • Suggestions for future work • Lessons learned • Risks and risk management • Closing summary
Testing, its results, and associated mod activities • Testing for the system is completed in a modular fashion • Each piece is tested for correctness • A integration test is then performed for each sub-system, then another to integrate each sub-system into the whole • To date, testing has revealed several small hardware problems that are being dealt with this semester
Other important activities • New web based documentation • New carbon fiber enclosure, will solve the weight problem from last year • Test stand for local flight testing • Successful load testing for the helicopter • Min – 11.5lbs • Max – 14lbs
Resources and Schedules • Resources • Personnel hourly contribution • Financial requirements • Schedules • Project gantt chart
Presentation outline • Definitions • Acknowledgement • Problem statement • Operating environment • Intended users and uses • Assumptions and limitations • End product requirements • Project activity • Previous accomplishments • Present accomplishments • Future required activities • Approaches considered • Project definition activities • Research activities • Design activities • Implementations activities • Testing activities • Resources and schedules • Project evaluation • Commercialization • Suggestions for future work • Lessons learned • Risks and risk management • Closing summary