Asparagus Computer Vision Aided Detection
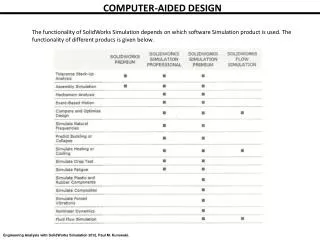
Asparagus Computer Vision Aided Detection. By Ryan Moore & Gerti Tuzi Advisor: Dr. Miller. Geometrical Setup and Data Extraction. Geometrical Setup. Data Extraction – Object Labels. Location Determination. Marker Height Equation (Best Fit Line). World Distance Equation (Best Fit Line).

Asparagus Computer Vision Aided Detection
E N D
Presentation Transcript
Asparagus Computer Vision Aided Detection By Ryan Moore & GertiTuzi Advisor: Dr. Miller
Geometrical Setup and Data Extraction Geometrical Setup Data Extraction – Object Labels
Location Determination Marker Height Equation (Best Fit Line) World Distance Equation (Best Fit Line) • Data extracted from digital images were plotted against respective world measurements. • Strong relationship between digital and world measurements • Prediction test were run successfully. Average prediction errors were : 3% and 3.5% for base distance and marker height respectively
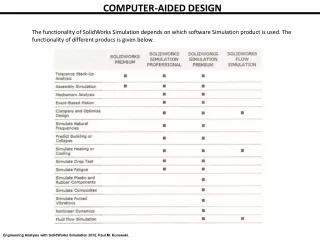
Binary Morphological Filters • Filter method one concentrates on using erosion, dilation, opening, closing, and image subtraction to eliminate the noise.
Transform problems • Major shifts in the laser maker at the final output of the image.
Object Detection: Blob Detection Binary Transform Original Frame Detected Blob • These detections were achieved using cvBlobsLib. • This is an open source library based on OpenCV libraries.
Inaccurate Detections Original Image Binary Transformation Detected Blobs • When other objects have the same light intensity as the intended (positive) objects, they are shown in the transformed image • Post processing can be used to filter out blobs based on area, min/max size and many more tools. • Final hardware required to determine typical positive object characteristics in order to apply correct post-processing method. • These tools are available in the cvBlobLiblibraries.
Summary • 1. Test results show that the geometrical setup does predict fairly accurately the distance and the height of the marker • Better setup would improve accuracy • Image transforms required to keep the marker on the frame and remove other background objects and noise. • Several methods available. • Final setup required to determine the best transforms and digital filtering. • Test showed that available blob detection code performs as expected. • False objects also detected due to the unfiltered background noise. • Several methods available to filter background and noise caused blobs. • Study required to determine appropriate characteristics. • Final hardware required to determine final methods and processing