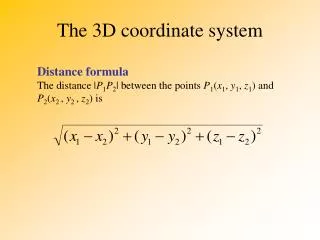
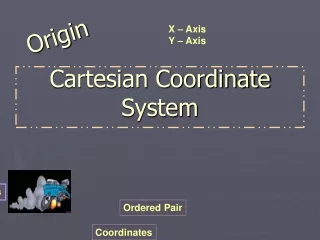
Default VRML Coordinate System
PC Screen. +y. +z. +x. Default VRML Coordinate System. - indicates axis coming out of diagram. -Z tank. -16.0. Top Down View. +Y tank. +Y tank. +X tank. -X tank. 20.5. -20.5. +8.75. +Z tank. * Y = 0 at mean water surface. +X tank. +Z tank. Four front windows.

Default VRML Coordinate System
E N D
Presentation Transcript
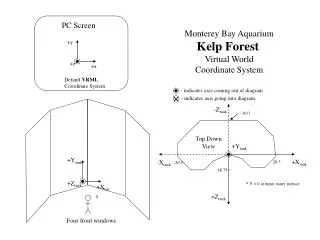
PC Screen +y +z +x Default VRML Coordinate System - indicates axis coming out of diagram -Ztank -16.0 Top Down View +Ytank +Ytank +Xtank -Xtank 20.5 -20.5 +8.75 +Ztank * Y = 0 at mean water surface +Xtank +Ztank Four front windows Monterey Bay Aquarium Kelp Forest Virtual World Coordinate System × - indicates axis going into diagram
PC Screen +y +z +x Default VRML Coordinate System - indicates axis coming out of diagram
- indicates axis coming out of diagram Tank Coordinate System +Ytank +Ztank +Xtank -Xtank +Ytank Four front windows * Y = 0 at mean water surface
Tank Coordinate System -Ztank -16.0 Top Down View +Ytank +Xtank -Xtank -20.5 20.5 +8.75 +Ztank - indicates axis coming out of diagram * Y = 0 at mean water surface
Locale Coordinate System Specific “Locale” +Ylocale +Zlocale +Xlocale
Fish Heading Fish Path locale locale t0 t1 +Xlocale /2 t 2 t1 t0 +Zlocale Example of a fish swimming in a circle inside a specific locale Note: Time measured in seconds Measured in radians about ylocale-axis;
Entity Coordinate System Fish Wiggle +Yentity +Zentity +Xentity entity measured in radians about entity y-axis t t0 t1
Entity Coordinate System +Yentity +Zentity +Xentity
Fish Wiggle entity t t0 t1 measured in radians about yfish-axis
Fish Depth ytank t 0 t1 t0 -10 Note: Time measured in seconds Depth measure in meters
Cylindrical Coordinate System +y +y (x1, y1, z1) • -z r • (x0, y0, z0) r +x +x +z measured in radians about z-axis, right-hand rule applies, = 0 on X-axis X1 = X0 + r cos( ) Z1 = Z0 - r sin( ) Y1 = Y0