Download

1 / 49
500 likes | 776 Views
J-PARC 3GeV RCS における 大強度出力に向けた ペインティング入射の研究. 広島大学院 理学研究科 物理科学専攻 博士課程後期 2 年 クォーク物理学研究室 J-PARC 加速器第 6 セクション 受入指導教官 入江 吉郎 原田 寛之 2008 年 3 月 11 日 ( 火 ) 、平成 19 年度特別共同利用研究員報告会. 報告概要. 研究背景 研究目的 運転・調整システムとコミッショニングツール 実運転とビームコミッショニング ペインティング入射に向けて まとめ. 報告概要. 研究背景 研究目的

E N D
J-PARC 3GeV RCSにおける大強度出力に向けたペインティング入射の研究 広島大学院 理学研究科 物理科学専攻 博士課程後期 2年 クォーク物理学研究室 J-PARC 加速器第6セクション 受入指導教官 入江 吉郎 原田 寛之 2008年3月11日(火)、平成19年度特別共同利用研究員報告会
報告概要 • 研究背景 • 研究目的 • 運転・調整システムとコミッショニングツール • 実運転とビームコミッショニング • ペインティング入射に向けて • まとめ
報告概要 • 研究背景 • 研究目的 • 運転・調整システムとコミッショニングツール • 実運転とビームコミッショニング • ペインティング入射に向けて • まとめ
研究背景~ J-PARC • 多段構成加速器群 • 400 MeV (運転開始時 181 MeV) 線形加速器 (LINAC) • 3 GeV 25 Hz シンクロトロン (RCS) • 50 GeV (運転開始時 30/40 GeV) シンクロトロン (MR) • 原子力機構(JAEA)と高エネルギー加速器機構(KEK)が共同で建設中 • 2008 年後半稼動開始予定
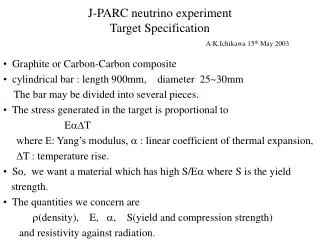
研究背景~ 3 GeV RCS 物質・生命科学実験施設 および 50 GeV MR へ出射 RCS 周長 [m]348.333 周回数 [turns]15000 入射エネルギー [GeV] 0.4(0.18) 出射エネルギー [GeV] 3.0 陽子数/パルス [1013] 8.3 (2.5) 繰返周波数 [Hz]25 入出射電流 [μA] 333(100) 出力 [MW] 1.0 (0.3) LINAC より入射 加速器トンネル内への入退出、機器の補修等から低ビーム損失の実現が大強度ビーム出力には必須となる。
研究背景~大強度に伴うビーム損失起源と対策研究背景~大強度に伴うビーム損失起源と対策 大強度出力の加速器では、空間電荷効果によるベータトロンチューンシフトを緩和する必要がある。そのために、RCSでは横方向ペインティング入射を行い、実空間で一様分布を形成させる。最適な入射には入射部のパラメータの最適化に加え、リングのパラメータの把握が不可欠である。 nt:粒子の密度に比例した量 rp:陽子の古典半径 ε:エミッタンス β、γ:ローレンツファクター ラスレットの式
報告概要 • 研究背景 • 研究目的 • 運転・調整システムとコミッショニングツール • 実運転とビームコミッショニング • ペインティング入射に向けて • まとめ
研究目的 • 本研究では、J-PARC 3GeV RCSにおける • 迅速な運転・調整を行うシステムの構築 • 加速器モデルの構築 • コミッショニング手法の検証およびツール群の作成 • 実運転におけるビームコミッショニング • を行い、リングのパラメータの把握および調整を行う。 • 得られたパラメータをベースとして、大強度出力に必須である横方向ペインティング入射手法の確立を目指す。
報告概要 • 研究背景 • 研究目的 • 運転・調整システムとコミッショニングツール • 実運転とビームコミッショニング • ペインティング入射に向けて • まとめ
Main Frame for monitoring of all parameters Database Archive Accelerator Model EPICS IOC For Operation and Optics Parameters Virtual Accelerator 運転・調整システムとコミッショニングツール~ RCSにおける運転・調整システム Operation Interface and High Level Application by SAD Operation Interface Accelerator Devices and Beam Monitors IOC IOC IOC File Real Accelerator
Main Frame for monitoring of all parameters Database Archive EPICS IOC For Operation and Optics Parameters Virtual Accelerator 運転・調整システムとコミッショニングツール~加速器モデルの構築 Operation Interface and High Level Application by SAD Operation Interface Accelerator Model Accelerator Devices and Beam Monitors IOC IOC IOC File Real Accelerator
運転・調整システムとコミッショニングツール~実測に基づく加速器モデル (by SAD) 物質・生命科学実験施設 および 50 GeV MR へ出射 • 偏向電磁石→K0, K2,・・・, K6 • 四極電磁石→K1, K2,・・・, K8, K9 • 六極電磁石→K2 • 補正電磁石→K0 • 入出射セプタム→K0 • キッカー電磁石→K0 • シフトバンプ電磁石→K0, K1,・・・, K4 LINAC より入射
運転・調整システムとコミッショニングツール~シフトバンプ電磁石のモデル化運転・調整システムとコミッショニングツール~シフトバンプ電磁石のモデル化 QFL QDL SB1 SB2 SB3 SB4 分割した両端の電磁石に組み込む それぞれの分割した電磁石の磁場を多極展開し、十極成分までを実装
Main Frame for monitoring of all parameters Database Archive EPICS IOC For Operation and Optics Parameters Virtual Accelerator 運転・調整システムとコミッショニングツール~コミッショニング手法の検証 Operation Interface and High Level Application by SAD Operation Interface Accelerator Model Accelerator Devices and Beam Monitors IOC IOC IOC File Real Accelerator
運転・調整システムとコミッショニングツール~コミッショニング手法の検証運転・調整システムとコミッショニングツール~コミッショニング手法の検証 • ベータトロンチューン測定 • クロマティシティ測定 • 分散関数測定 • 補正電磁石による軌道の応答関数測定ならびにβ関数測定 ・・・・・・
RF frequency@DC 2ms 10ms 20ms 運転・調整システムとコミッショニングツール~光学パラメータの測定手法の検証 ビームの中心運動量を変化させつつ、ベータトロンチューンやCODを測定することで、クロマティシティや分散関数を測定する。RCSではRFの周波数を変化させて、中心運動量を変化させるが、入射時から周波数をシフトさせると中心運動量にマッチした粒子がビーム内に存在しない。そこで、RFの周波数パターンを仮想加速器であらかじめ見積もった。その結果より、現在2msから10msまで徐々に変化させ、10ms以降でデータ取得を行った。 Longitudinal Phase Space @ 10 ms
運転・調整システムとコミッショニングツール~ギャップ調整による磁場補正運転・調整システムとコミッショニングツール~ギャップ調整による磁場補正 SB2とのBL比 : dBL_SB1 = -0.66 %,dBL_SB4 = -0.39 %
運転・調整システムとコミッショニングツール~周回軌道への影響運転・調整システムとコミッショニングツール~周回軌道への影響 入射バンプ軌道 COD<1mm スペーサー= 0.3 mm COD~5mm スペーサー無し
報告概要 • 研究背景 • 研究目的 • 運転・調整システムとコミッショニングツール • 実運転とビームコミッショニング • ペインティング入射に向けて • まとめ
Main Frame for monitoring of all parameters Database Archive EPICS IOC For Operation and Optics Parameters Virtual Accelerator 実運転とビームコミッショニング Operation Interface and High Level Application by SAD Operation Interface Accelerator Model Accelerator Devices and Beam Monitors IOC IOC IOC File Real Accelerator
実運転とビームコミッショニング~ シフトバンプの周回軌道への影響 磁場解析とモデル化の結果を用いた計算と同様に、シフトバンプ電磁石による周回軌道のずれは1mm以下となった。 磁場解析と計算に基づく磁場補正が十分機能しており、バンプ軌道が非常によく閉じた。 BPM with two beam BPM located at high dispersion Noisy BPM
実運転とビームコミッショニング~周回モード移行後のビーム損失実運転とビームコミッショニング~周回モード移行後のビーム損失 kicker 周回モード移行後、C12でビームが全てなくなる。
実運転とビームコミッショニング~仮想加速器を用いたビームロス起源の同定実運転とビームコミッショニング~仮想加速器を用いたビームロス起源の同定 ビームロス QFM 全四極電磁石の内のQFMの極性を逆にし、仮想加速器を用いて仮想入射を行った結果、実加速器におけるビームロスの位置が一致 →トンネルに入り、極性を確認した結果、QFMの極性のみ逆になっていた。
実運転とビームコミッショニング~加速器モデルを用いた光学パラメータの補正実運転とビームコミッショニング~加速器モデルを用いた光学パラメータの補正 βx, βy ηx, ηy 測定したベータトロンチューン、ベータ関数、分散関数 から加速器モデルを用いて四極電磁石の補正量を求めた。
実運転とビームコミッショニング~ベータトロンチューン測定ツール実運転とビームコミッショニング~ベータトロンチューン測定ツール Auto peak search for Qx Auto peak search for Qy
報告概要 • 研究背景 • 研究目的 • 運転・調整システムとコミッショニングツール • 実運転とビームコミッショニング • ペインティング入射に向けて • まとめ
SB PB ペインティング入射に向けて~ ペインティング入射の調整手法 x’ ペインティング入射は、ペイントバンプで周回軌道を時間的に変化させつつ、ビームを入射することで、位相空間上に一様にビームを広がらせる。 ペイントバンプのタイミングをずらしながら1バンチ入射を行い、位相空間上の入射座標(x,x’)を同定する。このように、ペインティング入射の模擬試験を行い、ペインティング入射の基礎を構築する。 ペインティングエリア x 入射ビーム 時間 多周回入射におけるバンプ波形と入射ビームの模式図
ペインティング入射に向けて~位相空間内の入射座標の同定ペインティング入射に向けて~位相空間内の入射座標の同定 TuneBPM 1st foil
ペインティング入射に向けて~入射軸ずれによるビーム運動ペインティング入射に向けて~入射軸ずれによるビーム運動 The transfer matrix M foil→TuneBPM from foil to monitor is The matrix for n turns is The position and derivative after n turns if there is injection error are
ペインティング入射に向けて~ 応答行列の測定と入射座標の同定 Response Matrix is We can identify the injection error (xe,xe’) from this RM and the measured real & imagine part of betatron peak
まとめ • J-PARC 3GeV RCSにおける運転・調整システムを構築した。 • 仮想加速器を用いて、コミッショニング手法の検証を行い、コミッショニングツール群の作成を行った。 • コミッショニングツール群を実加速器に適用し、実運転における運転・調整を行った。 • 今後、大強度出力に向けた入射調整の手法を確立する。
3 GeV RCS入射部 SB:水平シフトバンプ電磁石4台 PB:水平ペイントバンプ電磁石4台 RCS 入射-ダンプ ライン 入射セプタム電磁石1 荷電変換フォイル 廃棄セプタム電磁石2 廃棄セプタム電磁石1 入射セプタム電磁石2 SB1 SB2 SB3 SB4 PB1 PB2 PB3 PB4 四極電磁石 四極電磁石
多極展開と各次数の導出 By [T] 分割した各電磁石ごとでxに対して、多項式で最小二乗法近似を行い、各次数を導出 <多極展開> x [m] 磁極中心(x=0) <次数の決定> 低い次数から次数nの組み合わせを変更し、Χ2が最小となる次数の組み合わせを求めた。組み合わせの次数: n = 0,1,2,3,4 その組み合わせの次数を固定し、次数を増やしながら、次数の係数を求めた。 →5次以降の係数は影響しないため、4次までの係数のみを用いた。
By [T] By [T] x [m] x [m] By [T] By [T] x [m] x [m] 多項式による最小二乗法近似の結果 (1) ☆ 高統計のデータから測定誤差を見積もった ☆ 5σ以上離れたデータ点を測定エラーとして除外と再度フィットを繰り返し行い、各係数を導出
多項式による最小二乗法近似の結果 (2) a0 a1 a2 a3 a4 z [m] z [m] z [m] z [m] z [m] 主成分(二極) 四極成分 六極成分 八極成分 十極成分 左式より、導出したanからKn値を算出
QFL-SB1 (x=0,y=0) 四極電磁石の有りと無しのデータを比較(赤点:有り、黒点:無し) By [T] By [T] 拡大 Z [cm] Z [cm] BL_有り= 0.191670 BL_無し= 0.192296 四極電磁石が設置されたことによる磁場の減少が見える -0.32%
コミッショニングツール~COD Correction Before COD Correction After COD Correction
コミッショニングツール~Chromaticity Measurement ノブ:RF周波数 測定:チューン 補正前: ξx = -10.33 ξy = -7.20 補正後: ξx = 0.63 ξy = -0.97
入射軸ずれによるビーム運動 In the case of Injection Error (Δx@foil, Δx’@foil) at foil, position and derivative (Δx@TuneBPM, Δx’@TuneBPM) of first tune at BPM for measurement of betatron tune is M foil -> TuneBPM is constant if the setting value of QM and BM are no change.
入射軸ずれによるビーム運動 The transfer matrix M foil→TuneBPM from foil to monitor is The matrix for n turns is The position and derivative after n turns if there is injection error are
Discrete Fourier transform (DFT) A sampled function f(nT0) at TuneBPM is The DFT of a sampled function f(nT0) at TuneBPM is given by where the integer m defines the frequency component, N is the total number of samples or turns, and i = sqrt[-1]. where m=kxis the frequency component closest to the true betatron frequency.
DFT components DFT components, which are coslike and sinlike, are at
応答行列 x0 : initial position, x0’ : initial derivative Betatron response matrix can be defined as α, β: Twiss parameter for transverse plane Real and Imagine part of the detected betatron sideband peak
Measurement of RM for RCS (1) In the case that the position at foil is changed by SB, i.e, Δx@foil’=0, In the case that the derivative at foil is changed by ISEP, i.e, Δx@foil=0,
Measurement of RM for RCS (2) Response Matrix is We can identify the injection error (xe,xe’) from this RM and the measured real & imagine part of betatron peak