Download

1 / 15
150 likes | 266 Views
This project outlines essential concepts in CNC programming and robotic integration for computer-integrated manufacturing. It covers NC codes, handshaking procedures, and sample programming for CNC mills and robots, including TTL I/O wire connections. Learn about preparatory codes, motion commands, and how to set up communication between CNC machines and robots. A sample NC program is detailed, alongside handshaking codes for effective coordination during operations. This guide is perfect for professionals seeking to enhance their skills in automated manufacturing processes.

E N D
CNC Programming / Robotic Integration Project Lead The Way Computer Integrated Manufacturing
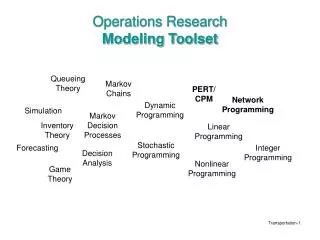
CNC and TTL Programming • NC Codes • Sample NC Part and Program • Handshaking Codes • Sample Mill Handshaking • Flow of Robot program • Sample Robot Handshaking Program • TTL I/O Wire Connections
NC Codes • Block Number (N) • Preparatory Codes (G) • Miscellaneous Codes (M) • Primary X Motion (X) • Primary Y Motion (Y) • Primary Z Motion (Z)
Preparatory Codes • G90 - Absolute Coordinates • G91 - Relative Coordinates • G00 - Rapid Traverse (non-cutting move) • G01 - Straight Line Interpolation (cutting move • G02 - Circle Interpolation (clockwise) • G03 - Circle Interpolation (c-clockwise) • G04 - Dwell (wait) Pause between motions on all axis. Time in seconds - G04F2 - pause for 2 sec. • G05 - Pause - waits for user intervention.
M Codes - Miscellaneous • M00 - Pause • M01 - Optional stop • M02 - End of Program • M03 - Spindle on • M05 - Spindle off • M06 - Tool Change • M08 / M09 - Accessory # 1 on / off • M10 / M11 - Accessory # 2 on / off
Sample NC Program Block N00G90G01X.5Y.5Z0F1 FEED RATE (IN/MIN) Z COORDINATE Y COORDINATE X COORDINATE PREP CODE - SL INTERPOL PREP CODE - ABSOLUTE BLOCK SEQUENCE #
SAMPLE PART ABSOLUTE COORD.
SAMPLE PROGRAM N00 G90 ; ABSOLUTE COORDINTAES N01 M06T1 ; LOAD TOOL 1 N02 M03 S3000 ; TURN SPINDLE ON TO 3000 RPM N03 G00 Z .1; RAPID TO .1 ABOVE PART N04 G00 X.5Y.5 ; RAPID TO POINT A N05 G01 Z-.0625F9 ; PLUNGE 1/16 AT 9 IN/MIN. N06 G01 X.5Y1.5; STRAIGHT LINE INTERP TO B N07 G01 X.875Y1; STRAIGNT LINE INTERP TO C N08 G01 X1.25Y1.5; STRAIGHT LINE INTERP TO D N09 G01 X1.25Y.5; STRAIGHT LINE INTERP TO E N10 G01 Z.1; RETRACT CUTTING TOOL
Sample Program Continued N11 G00 X1.75Y1.5; RAPID TO POINT F N12 G01 Z-.0625F9; PLUNG AT 9 IN/MIN. N13 G01 X1.75Y.5; STRAING LINE INTERP TO H N14 G03 X1.75Y1.5I1.75J1; CCW CIRCLE INTERP. N15 G01Z.1; RETRACT CUTTING TOOL N16 M05; TURN OFF SPINDLE N17 M06T00; UNLOAD CUTTING TOOL N18 G00X4Y3Z3; MOVE TABLE TO UNLOADING POSITION N19 M02; END OF PROGRAM SIMULATE
Handshaking Codes • G25 - Wait until TTL output #1 (Robot) goes on • G26 - Waits until TTL output #1(Robot) goes off • G35 - Wait until TTL output #2 (Robot) goes on • G36 - Waits until TTL output #2(Robot) goes off • M25 - Sets Robot input #1 to off (Starts Robot) • M26 - Sets Robot input #1 to on • M35 - Sets Robot input #2 to off (Starts Robot) • M36 - Sets Robot input #2 to on
Handshaking With The Mill M10; OPEN VISE M26; TURN ROBOT INPUT ON (RESTRICTS ROBOT MOVEMENT) G00; MOVE TO LOAD/UNLOAD POSITION M25; TURN ROBOT INPUT OFF (START ROBOT - LOAD/UNLOAD) G04 F2; PAUSE FOR 2 SECONDS M26; RESET ROBOT INPUT TO ON G25; WAIT FOR ROBOT OUT #1 TO TURN ON THEN ONTINUE M11; TURN AUX. #2 OFF (CLOSE VISE) ****** RUN MILL PROGRAM ******************** M47; REWIND PROGRAM
FLOW OF ROBOT PROGRAM WAIT FOR MILL INPUT LOAD VISE CYCLE OUTPUT TO MILL - CUT PART WAIT FOR MILL INPUT UNLOAD VISE CYCLE
Handshaking With The Robot • WAIT • GO TO POSITION - SAFE POSITION • IF INPUT 1 OFF JUMP TO START (FROM MILL) • JUMP TO WAIT • START • LOAD MILL VISE • GO TO POSITION - SAFE POSITION • TURN OUTPUT 1 ON (START MILL PROGRAM) • WAIT 10 - WAIT FOR 1 SECOND • TURN OUTPUT 1 OFF (LIMIT MILL TO 1 CYCLE) • WAIT FOR MILL LOOP - UNLOAD VISE • JUMP TO START
Gravity Feeder Connection • Connect one wire to Input #2 • Connect second wire to Input Ground