Download
1 / 1
10 likes | 232 Views
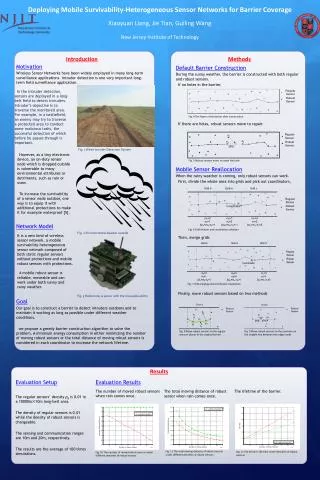
Deploying Mobile Survivability-Heterogeneous Sensor Networks for Barrier Coverage. Xiaoyuan Liang, Jie Tian , Guiling Wang. New Jersey Institute of Technology. Introduction. Methods. Motivation

E N D
Deploying Mobile Survivability-Heterogeneous Sensor Networks for Barrier Coverage Xiaoyuan Liang, JieTian, Guiling Wang New Jersey Institute of Technology Introduction Methods Motivation Wireless Sensor Networks have been widely employed in many long-term surveillance applications. Intruder detection is one very important long-term field surveillance application. Network Model Goal Our goal is to construct a barrier to detect intruders outdoors and to maintain it working as long as possible under different weather conditions. we propose a greedy barrier construction algorithm to solve the problem. A minimum energy consumption in either minimizing the number of moving robust sensors or the total distance of moving robust sensors is considered in each coordinator to increase the network lifetime. Default Barrier Construction During the sunny weather, the barrier is constructed with both regular and robust sensors. If no holes in the barrier, If there are holes, robust sensors move to repair. Mobile Sensor Reallocation When the rainy weather is coming, only robust sensors can work. First, divide the whole area into grids and pick out coordinators, Then, merge grids Finally, move robust sensors based on two methods In the intruder detection, sensors are deployed in a long-belt field to detect intruders. Intruder’s objective is to traverse the monitored area. For example, in a battlefield, an enemy may try to traverse a protected area to conduct some malicious tasks, the successful detection of which before he passes through is important. Fig. 4 The figure of the barrier after construction Fig. 1 Wired Intruder Detection System • However, as a tiny electronic device, an on-duty sensor node which is dropped outside is vulnerable to many environmental attributes or detriments, such as rain or snow. • To increase the survivability of a sensor node outdoor, one way is to equip it with additional protections to make it for example waterproof [5]. Fig. 5 Robust sensors move to repair the hole Fig. 7 Grid merging and coordinator reselection Fig. 6 Grid division and coordinator selection Fig. 9 Move robust sensors to the positions on the straight line between two edge noeds It is a new kind of wireless sensor network, a mobile survivability-heterogeneous sensor network composed of both static regular sensors without protections and mobile robust sensors with protections. A mobile robust sensor is reliable, moveable and can work under both sunny and rainy weather. Fig. 2 Environmental disaster outside Fig. 11 The total moving distance of robust sensors under different densities of robust sensors Fig. 3 Robomote, a sensor with the moveable ability Fig. 10 The number of moved robust sensors under different densities of robust sensors Fig. 8 Move robust sensors to the regular sensors’ places in the original barrier Fig. 11 The barrier’s life time under densities of robust sensors Results • Evaluation Setup • The regular sensors’ density ρg is 0.01 in a 10000m✕10m long-belt area. • The density of regular sensors is 0.01 while the density of robust sensors is changeable. • The sensing and communication ranges are 10m and 20m, respectively. • The results are the average of 100 times simulations. • Evaluation Results • The number of moved robust sensors when rain comes once. • The lifetime of the barrier. • The total moving distance of robust sensor when rain comes once.