Download
1 / 31
310 likes | 595 Views
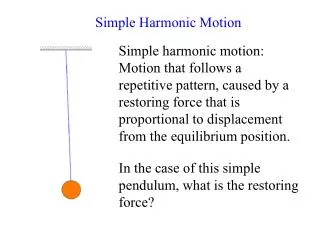
A. -A. 0. Equilibrium Position. Simple Harmonic motion . I. Hooke’s Law. F s = - kx. Where:. x = displacement from equilibrium position (m). k = spring constant (N/m). F s = “restoring Force” (F) .

E N D
A -A 0 Equilibrium Position Simple Harmonic motion
I. Hooke’s Law Fs = -kx Where: x = displacement from equilibrium position (m) k = spring constant (N/m) Fs = “restoring Force” (F) {since the force restores the mass to equilibrium position you have a negative sign in the equation} Go to IB Lab on SHM and Hooke’s Law
Some Definitions: A = amplitude (maximum displacement from the rest position) (m) T = Period (time to complete on motion (s) f = frequency number of cycles (motions) per second (1 cycles/sec = 1 Hertz = 1 Hz) x = -A o x = A Then: A = x (at maximum displacement) Since: Fs = -kx And maximum: Fs = -kA And Since: F = ma F = ma = Fs = -kA a = F/m a = (-k/m)A (maximum acceleration)
And: a = (-k/m)x Which would be the acceleration at any point. At equilibrium position x = 0 and acceleration would be zero as well but mass would be travelling at its maximum speed!) Acceleration would vary from: x = -A o x = A (-k/m)x to (+k/m)x - max. + max. a v - max. 0 0 max. + max. 0
II. Potential and Kinetic Elastic Energy Remember: P.E.g = mgh and K.E. = ½ mv2 Gravitational Potential Energy Kinetic Energy And Elastic Potential Energy = P.E.s = 1/2kx2 Law of Conservation still applies: Total energy in a system is always conserved! Total Energy before = Total Energy after P.E.g1 + K.E.1 + P.E.s1 = P.E.g2 + K.E.2 + P.E.s2 + Q Heat Energy due to friction
For a spring oscillating on a table: Since there is no change in height: P.E.g1 = P.E.g2 (mass is on a table) And we can ignore this term from the conservation of energy equation. We will also assume there is no friction so there is no heat loss: Q = 0) Initial compression a Mass-spring: x = x1 x = -A o x = A P.E.s1 = -1/2kx2 = -1/2kA2 K.E.1 = 1/2mv2 (max K.E. and therefore max. speed v at the equilibrium position) P.E.s2 = +1/2kx2 = +1/2kA2 v1 At any other position of the mass (x1): T.E. = P.E.s + K.E. T.E. = 1/2kx12 + 1/2mv12
III. Velocity as a function of Position x1 A At maximum displacement, A, the velocity would be zero T.E. = P.E.s = 1/2kA2 v = 0 At some other position, x1, the velocity is v. The store potential energy is being transferred by motion into kinetic energy. v P.E.s = P.E.s(x1) + 1/2mv2 1/2kA2 = 1/2kx12 + 1/2mv2
1/2kA2 = 1/2kx12 + 1/2mv2 Cancel out the 1/2 kA2 = kx12 + mv2 Move the Kx2 to other side kA2 - kx12 = mv2 Factor out the k k(A2 - x12) = mv2 Divide both sides by m k/m(A2 - x12) = v2 Taking the square root of both sides yields a simple equation for calculating the speed of a mass at any point along is SHM. v = k/m(A2 - x2)
IV. Comparing SHM with Uniform Circular Motion Imagine this small red ball rotating around a vertical circle at a constant speed. Also imagine a light source above the ball shining down on to the table top. The red ball’s shadow would simply move back and forth replicating the SHM of the mass attached to a spring seen earlier. Since the sliding mass-spring and the ball’s motions are similar they can be dealt with similar equations. This will also allows us to bring in circular motion and uniform circle mathematics into play.
The side of a triangle formed by radius A, and vertical length y is given by: A y y = ø (From Pythagorean theory) Since : Let the constant C = k/m Unit Circle v = ± k/m(A2 - x2) (A2 - x2) Therefore: v = ± C (A2 - x2)
Lets focus in on the velocity of the object in uniform circular motion: Its tangential velocity vo is shown in yellow. ø vo vx Its SHM velocity vx is shown in green. A ø Similar triangles: (A2 - x2) x vx Sin ø = and Sin ø = vo A Therefore: (A2 - x2) vx = vo A
A little re-arranging will yield this: Remember this: vo Therefore: vo C = V. Period and Frequency A A 1/T = f and f = 1/T r v = d/t For circular motion: (A2 - x2) d = 2πr and t = T v = Therefore: v = 2πr /T = 2πrf v = ± C (A2 - x2) And finally: T = 2πr/v f = v/2πr
Bringing back energy: P.E. = K.E. 1/2kA2 = 1/2mv2 Cancel out the ½: 1/2kA2 = 1/2mv2 kA2 = mv2 Re-arrange a little: A2 /v2 = m/k A/v = m/k For Period: T = 2πr/v Let r = A (see unit circle) T = 2π And the reciprocal would be the frequency: k/m m/k f = 1/2π
One more set of energy equations: ω = 2πf K.E. = 1/2mv2 = 1/2m (ω xo2 - x2 )2 K.E. = 1/2mv2 = 1/2m ω2 (xo2 - x2) For an object undergoing SHM P.E. = 1/2m ω2 x2 T.E. = -1/2m ω2 xo2 v = ω xo2 - x2
Example 1 A 0.35 kg ball moves in a horizontal circular motion completing 28 revolutions in 45 s. r = 0.56 m a) What is the frequency and period of the ball? f = 28/45 = 0.622 Hz T = 45/28 = 1.61 s b) What is the angular velocity? ω = 2π/T = 2πf = 2π x 0.622 = 3.91 rad/s c) What is the angular acceleration? a = - ω2x a = - (3.91)20.56 = 8.6 rad/s2
VI. Position as a function of Time: The ball is at position P along the circular path. P The position of the red ball along the x-axis is given by x. A ø x = A x cos ø x x Cos ø = A Remember Rotational Motion : Ø = (ωt) And ω = 2πf Ø = (2πf t) And therefore: x = A x cos (2πf t)
The position of an object undergoing SHM is given by a cosine wave: +1 x = A x cos (2πf t) 0 T T/2 The velocity of an object undergoing SHM is given by the sine wave: -1 v = -ωA x sin (ω t) The acceleration of an object undergoing SHM is given by the cosine wave: a = -ω2A x cos (ω t)
Example 2 A 0.50 kg mass at the end of a spring completes 8.0 oscillations in 12 s with an amplitude of 0.26 m a) What is the velocity of the mass when it passes the equilibrium point? (at equilibrium point x = 0) vmax = A k/m vmax = A vmax = 0.26 f = 1/(2 π) k/m (m4π2f2)/m (4π2(8.0/12)2) k = m4π2f2 vmax = 1.22 m/s v = ± k/m(A2 - x2) v = ± k/m(A2 ) Or vmax = A x 2πf = 0.26 x 2 x 3.14 x (8.0/12) = 1.22m/s
b) What is the velocity of the mass when it is 0.15 m from equilibrium? vx = + 1.09 m/s x 0.8168 vx = + 0.89 m/s c) What is the total energy of the system? T.E. = ½ mv2max T.E. = ½ 0.50 x 1.09 2 = 1.2 J d) Write the equation describing the motion of the mass, assuming x was a maximum at t = o? x = xo cos (ωt) x = Acos ((2πf)t) vx = +vmax/A(A2- x2) vx = + 1.09/.26 (0.262- 0.152) x = 0.26 cos ((1.33π)t)
VII. Pendulums At small angles of θ (less than 15o) pendulums follow SHM. θ l Sin θ = L L And at small angles: sin θ = θ (when in radians) T l θ = L mg sin θ l mg cosθ θ Fg = mg
Let’s look at the forces acting on the pendulum bob. F = mg sin θ (At small angle sin ø = ø) F = mg θ F = mg (but l = x) θ T Fg = mg F = mg F = mg sin θ Let : constant k = mg/L F = kx x l And we are back to Hooke’s Law! L L
Bringing back the Period and frequency equations: And k = mg/L ( for a pendulum) Therefore: (Cancel out the masses and bring up the L.) Pendulum Formula for Period (Cancel out the masses.) Pendulum Formula for frequency. T = 2π T = 2π T = 2π g/L m/k mg/Lm m/(mg/L) k/m L/g Note: Since no mass is present in either formula, the period or frequency of a pendulum is independent of its mass! f = 1/2π f = 1/2π f = 1/2π
Example 3 a) How long would a pendulum have to be to have a period of 3.5 s on Earth? L = (T2g)/(4π2) L = (3.52 x 9.8 )/(4π2) = 3.04 m T = 2π L/g T = 2π 3.04/1.63 b) How many oscillations would this pendulum have on the moon in a time of 35 s? = 8.51 s # of oscillations = 35 s/8.51 s = 4.11
Damped Harmonic Motion So far we have been dealing with perfect SHM and not considering the real motion of objects. For example a pendulum amplitude slowly decreases as does an oscillating mass attached to a spring. SHM – no damping Damped Harmonic Motion – the oscillations slowly decrease and die out Example: - shock absorbers in car - dampeners in bridges - shocks in bikes
DHM can be overdamped, or underdamped or critically damped: Displacement Overdamped - the damping is so large it will take a long time to reach equilibrium Critically Damped - equilibrium is reached in the shortest time Underdamped - the system will swing back and forth a number of times before coming to rest Some of the new tall buildings have built in dampeners that will “dampen” or reduce the vibrations caused by earthquake waves. In each case the dampening is caused by a force that opposes the original force that created the force. Often this force is simple friction, either in the system or generated by the design.
Forced Oscillations and Resonance: Think back to when you were a young child playing on a swing. Remember the joy you had when you mother pushed you to ever greater heights. Do you recall the even greater joy of being able to “pump” your legs yourself and move the swing on your own. So how does “pumping your legs work? How can your Mom with small pushes get you going so high? Or more importantly, why does your open coffee spill when you walk across the room with it? The answer to all of these is resonance and forced oscillations! All systems have a “natural” frequency at which they will naturally vibrate. They will create standing waves in the object in question.
Demo: Hang a slink from your hand and watch happens as it falls. It should vibrate up and down a little before it stops. If you move your hand up and down just slightly you should have very little effect on the slinky’s motion. (Try it!). f << fo (little or no effect) Likewise if you move your hand a great deal. The slinky will move at its own frequency independent of your hand’s motion f >> fo (little or no effect) Now move your hand so that is matches (or comes close to) the natural frequency) of the slinky. It will start to oscillate with greater and greater amplitude. f ≈ fo (large effect)
Since dampening causes oscillations to decrease you need to continually input and external force to have an object vibrate at its natural frequency. Tacoma Narrows Bridge Collapsed • Opened July 1, 1940; 860 m long, 12 m wide, 2.5 m high steel girders • Nov. 7, 1940 Wind of 60 to 70 km/h blew across it • Set the span to vibrate at 36 Hz • bridge’s northern main cable started became loose around 10:00 am • around 11:00 am the bridge collapsed Wooden Bridge Resonance 1 http://www.encyclopedia.com/video/nO0bSSXmr1A-rice-resonance.aspx Wooden Bridge Resonance 2 Glass Shattering Resonance Jamie Vendera Glass Shattering Resonance Slow Motion Chinook Helicopter Ground Resonance
Summary: Simple Harmonic Motion Equations: a = ω2x ω = 2πf vmax = ωr vmax = A x 2πf F = kx T = 2π L/g T = 2π m/k f = 1/(2 π) k/m x = xo cos (ωt) f = g/L P.E. = ½ kx2 K.E. = ½ mv2 T.E. = ½ kx2 + ½ mv2x = ½ kA2 1 2π vx = +vmax(1- (x2/A2) v = ω xo2 - x2
So how does “pumping your legs work? How can your Mom, with small pushes get you going so high? Or more importantly (from my point of view), why does your full open coffee cup spill when you walk across the room?
1) Go on to the Practice worksheet. 2) Do Problems # 1,2,3,5,7,9,14 ,15,19,21a-d,28,29,30, & 31 p.317 -318 of your text book