Download
1 / 14
140 likes | 270 Views
This document explores the intricate relationship between function and form in user-system interaction, highlighting how designers can align their mental models with users' mental models. It delves into design metaphors, historical trends in interface design, and emerging technologies like ambient intelligence and wearable computing. Through analysis of active forms such as the smart tennis racquet and other innovative tools, the material discusses the essential balance needed in adaptive systems to ensure a coherent and engaging user experience while addressing privacy and isolation challenges in immersive environments.

E N D
The Future of User-System Interaction Prof. dr. Matthias Rauterberg User-Centered Engineering Group TU/e Eindhoven University of Technology
How to relate function and form, so that DMM == UMM perceivable user interface forms implemented functions perceived semantic intended semantic DMM := designer’s mental model UMM := user’s mental model DESIGNER USER
Design Metaphors Substitute Channel Tool long time ago 2000 history
mechatronic style Design Trends (1) electronic style mechanical style time 1900 2000
mechatronic style Design trends (2) active forms connected forms (ambient intelligence) given forms (ubiquituous computing) electronic style channel forms (e.g. PC, TV, Radio, etc) mechanical style dedicated form (e.g. typewriter, etc)) time 1900 2000
Robots today... http://www.aibo.com/
Active Forms: smart tennis racquet The world's first chip-powered and electronically dampened racquet. Explosive power - ultimate comfort. The integrated ChipSystem™ boosts the electrical impulse by the power of 10.The racquet offers unprecedented power through the active counterforce during ball contact.The ChipStystem™ eliminates 50% of the vibrations during ball contact and reduces the remaining vibrations twice as quickly as racquets without ChipSystem™.PowerFrame™ technology for top handling and incredible stability.PowerPattern™ for a maximum sweetspot, power and control. swing style rating : S18 TECHNICAL SPECIFICATION Beam Box+PowerFrame™ Head size 780 cm2 / 121 sq. in. Weight (unstrung) 235 g / 8.3 oz. Balance (unstrung) 355 mm Length XtraLong, 28 Grip Size 0 - 5 Stringing PowerPattern™ 16/19
Active Forms: smart dragonfly Nitinol Dragonfly PairThese authentic-looking dragonflies really flap their wings! The wings move once every two seconds, just like a resting dragonfly. Just attach these dragonflies to plants, picture frames, or your computer monitor. The wings move thanks to nitinol, the muscle of Stiquito. Comes with a 115v transformer and long cable.
Active Forms: the magic teaspoon It looks just like an ordinary teaspoon. You hand it to someone to stir their tea or coffee with, they go to stir their drink and get... the shock of their life. The minute the teaspoon enters the boiling liquid, it bends in the middle. The bending isn't gradual, it is almost violent. Nervous people get quite a shock!
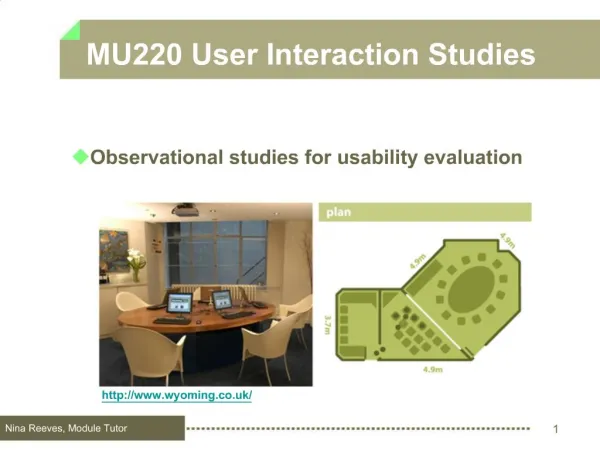
Two Trends in User Interface Technology Mobile computing Ambient rooms and Cooperative buildings
Unsolved Research Problems (1) wearable computing intelligent environments Isolation in immersive virtual worlds Penetration of the body space Privacy in augmented worlds Penetration of the social space
Unsolved Research Problems (2) If two adaptive systems (e.g., the human being and the adaptive technology) are coupled with each other, the following aspects have to be taken into account: (1) the adaptation rate (RsA) of the technical subsystem, and (2) the two different kinds of human influences on the technical subsystem: the explicit control rate (RhC) and the implicit adaptation rate (RhA). The main challenge of designing such a coupling is to avoid an unintended excelleration between both subsystems based on the closed loop coupling; with other words, what is the appropriate design for such kind of closed loop coupling?. How should be the relation [RhC + RhA] [RsA] established? Secondly, what is the proper balance between [RhC] [RhA]? These are two central research questions.