Download
1 / 26
260 likes | 428 Views
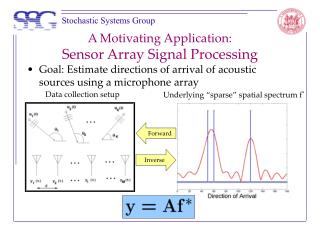
Quickest Detection of a Change Process Across a Sensor Array. Vasanthan Raghavan and Venugopal V. Veeravalli Presented by: Kuntal Ray. Outline. Introduction Problem Formulation DP Frame Work Recursion for Sufficient Statistics Structure for Optimal Stopping Rule References.

E N D
Quickest Detection of a Change Process Across aSensor Array VasanthanRaghavan and Venugopal V. Veeravalli Presented by: Kuntal Ray
Outline • Introduction • Problem Formulation • DP Frame Work • Recursion for Sufficient Statistics • Structure for Optimal Stopping Rule • References
Outline • Introduction • Problem Formulation • DP Frame Work • Recursion for Sufficient Statistics • Structure for Optimal Stopping Rule • References
INTRODUCTION • Sensors take observations ,responds to disruptive change • The goal is to detect this change point, subjected to false alarm constraints • Sequence of observations ,densities changes at unknown time has to be detected.
Two Approaches to change detection: - • Bayesian Approach • Change point is assumed to be a random variable with a prior density known as a priori • Goal is to minimize the expected detection delay subject to a bound on the false alarm Probability • Minimax Approach • Goal is to minimize the worst case delay subject to lower bound on the mean time between false alarm
Introduction… • Significant advances in theory of change detection has been made using single sensor • Also extension of those framework to the multi-sensor case has been studied, where information available for decision making is decentralized. • The above work assume that the statistical properties of the sensors’ observations change at the same time. • However, in many scenarios, it is more suitable to consider the case where each sensor’s observations may change at different points in time.
Introduction… • An application to such a model is detection of pollutants where the change process is governed by the movement of the agent through the medium under consideration. • This paper considers Bayesian version of this problem and assumes point of disruption is a random variable with Geometric Distribution.
INTRODUCTION… • Assume L sensors placed in an array • Fusion center has complete information about the observations. • This is applicable when ample bandwidth is available for communication between the sensors and the fusion center
INTRODUCTION… • The goal of the fusion center is to come up with a strategy to declare change, subject to false alarm constraints • Towards this goal, pose the problem in a dynamic programming (DP) framework and first obtain sufficient statistics for the DP under consideration • We then establish a recursion for the sufficient statistics which generalizes the recursion established in previous paper • Following along the logic of previous work they establish the optimality of a more general stopping rule for change detection.
Outline • Introduction • Problem Formulation • DP Frame Work • Recursion for Sufficient Statistics • Structure for Optimal Stopping Rule • References
PROBLEM FORMULATION • Consider L sensors that observes L dimensional Discrete time Stochastic process • Disruption in the sensing environment occurs at random time constant Γ1 • Hence the density of the observations at each sensor undergoes a change from the null density f0to the alternate density f1.
Problem Formulation… • Previous work considers change to be instantaneous to all the sensors at time Γ1 • In this paper they consider change process which evolves across the sensor array and the change seen by the lth sensor is given by Γl • Also assume the evolution of the change process is Markovian Process across the sensor
Problem Formulation… • Under this model, the change point evolves as a geometric random variable with parameter ρ. • P({Γ1 = m}) = ρ (1 − ρ)m, m ≥ 0. • As ρ 1 corresponds to case where instantaneous disruption has high probability of occurrence • As ρ 0 uniformizes the change point in the sense that the disruption is equally likely to happen at any point at any time
Problem Formulation… • Observations at every sensor are independent and identically distributed (i.i.d.) conditioned on the change hypothesis corresponding to that sensor. • Zk, ∼ i.i.d. f0 if k < Γ, i.i.d. f1 if k ≥ Γ. • Consider a centralized, Bayesian setup where a fusion center has complete knowledge of the observations from all the sensors • Ik {Z1, . . . ,Zk}
Problem Formulation… • The fusion center decides whether a change has happened or not based on the information, Ik, available to it at time instant k (equivalently, it provides a stopping time τ)
Problem Formulation… • Two conflicting performance measures on change detection are: - • Probability of false Alarm • PFA = P({τ < Γ1}) • The average detection delay, • EDD = E [(τ − Γ1)+] where x+ = max(x, 0).
Problem Formulation • The previous two conflicts are captured by Bayes Risk which is defined as: • R(c) = PFA + cEDD • For an appropriate choice of per-unit delay cost ‘c’ • The goal of the fusion center is to come up with a strategy (a stopping time τ) to minimize the Bayes risk
Outline • Introduction • Problem Formulation • DP Frame Work • Recursion for Sufficient Statistics • Structure for Optimal Stopping Rule • References
DP Framework • In their previous paper they had rewritten Bayes Risk as: • The state of the system at time k is the vector • Sk =[Sk,1, . . . , Sk,L] • With Sk, denoting the state at sensor . • The state Sk, can take the value 1 (post-change), 0 (prechange), or t (terminal). • The system goes to the terminal state t, once a change-point decision τ has been declared.
Outline • Introduction • Problem Formulation • DP Frame Work • Recursion for Sufficient Statistics • Structure for Optimal Stopping Rule • Asymptotically Optimal Test • Numerical Results • References
Recursion for Sufficient Statistics • Consider case where changes to all sensors happen at same instant. • In this setting, it can be shown that Random Variable P({Γ1 ≤ k}|Ik) serves as the sufficient statistics for the dynamic program and affords a recursion • But, we consider general case
Recursion for Sufficient Statistics • But as we consider general case, i.e. slow propagation of change
Outline • Introduction • Problem Formulation • DP Frame Work • Recursion for Sufficient Statistics • Structure for Optimal Stopping Rule • References
Outline • Introduction • Problem Formulation • DP Frame Work • Recursion for Sufficient Statistics • Structure for Optimal Stopping Rule • References
References [1] M. Basseville and I. V. Nikiforov, Detection of Abrupt Changes: Theory and Applications. Prentice Hall, Englewood Cliffs, 1993. [2] T. L. Lai, “Sequential changepoint detection in quality control and dynamical systems,” J. R. Statist. Soc. B, Vol. 57, No. 4, pp. 613–658, 1995. [3] G. Lorden, “Procedures for reacting to a change in distribution,” Ann. Math. Statist., Vol. 42, pp. 1987– 1908, 1971. [4] G. V. Moustakides, “Optimal stopping times for detecting changes in distributions,” Ann. Statist., Vol. 14, pp. 1379–1387, 1986. [5] M. Pollak, “Optimal detection of a change in distribution,” Ann. Statist., Vol. 13, pp. 206–227, 1985. [6] A. N. Shiryaev, “On optimum methods in quickest detection problems,” Theory Probab. Appl., Vol. 8, pp. 22–46, 1963. [7] A. N. Shiryaev, Optimal Stopping Rules. Springer- Verlag, NY, 1978. [8] A. G. Tartakovsky, Sequential Methods in the Theory of Information Systems. Radio iSvyaz’, Moscow, 1991 (In Russian).