Download
1 / 30
300 likes | 448 Views
Virtual arm for the Phantom Limb Pain Therapy. Eynard L. and Meyer A. and Bouakaz S. The Phantom Pain. Pain or discomfort felt by an amputee in the area of the missing limb Why? Physical Amputation ≠ Psychic amputation Mismatching between brain and reality → Pain Characteristics

E N D
Virtual arm for the Phantom Limb Pain Therapy Eynard L. and Meyer A. and Bouakaz S.
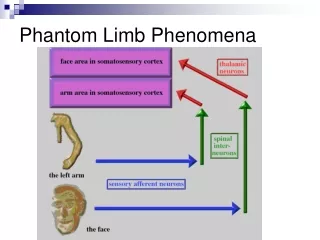
The Phantom Pain Pain or discomfort felt by an amputee in the area of the missing limb Why? • Physical Amputation ≠ Psychic amputation • Mismatching between brain and reality → Pain Characteristics • Strong pain, sometimes debilitating • Hard to treat Existing therapies • Medics, massage, relaxation, psychotherapies • New hopeful therapies …
News methods for therapy Cognitive Science Institute ISC Lyon [Sirigu03] [Ramachadran96]
Our idea • Computer Science • Posture Tracking (vision) • Augmented reality: virtual limb • Our system • Camera Posture analysis • Augmented picture of missing limb • Mirror screen
Presentation summary • Previous Works • Our contribution • Real-Time Posture Analysis • The mirror effect : Virtual arm • Results • Conclusion
Movements Tracking (vision) • Multi-cameras • Voxelic reconstruction [Mikic03,…] • 3D-model : recognition of the skeleton a 3d-grid • Monocular (1 camera) • Optical flow • Bayesian methods [Agarwal04,…] • Real-Time [Stenger03,…] • Limited movement • Small resolution
Our system constraints • Ours constraints • Real-Time (Interactivity) • Monocular (portative system)
Presentation summary • Previous Works • Our contribution • Real-Time Posture Analysis • Background substraction • Precomputation: anthropometric measures • Posture Tracking • Mirror effect : Virtual arm • Results • Conclusion
Background substraction • Learning-based algorithm • N frames → RGB values extrema for each pixel • Connexity search → noise reduction Simple and fast
Precomputation: anthropometric measures • Anthropometric values computation Needed for the tracking 2 postures Silhouette extraction
Head and Torso measurements • Pose 1: head measure • Highest pixel in silhouette
Head and Torso measurements • Pose 1: head measure • Highest pixel in silhouette • Going down into the image while Nbi(whitepixel)> Nbi-1(whitepixel)
Head and Torso measurements • Pose 1: head measure • « highest » pixel in frame • Going down on the image while Nbi(whitepixel)>Nbi-1(whitepixel) → Head width • Going down until Nb(whitepixel) < threshold* width → Shoulder line
Head and torso measurements • Torso measure • Barycenter line → Torso width • Going down until separation → bottom of the torso → Torso height width height
Arm measurements • Pose 1 • Level and side of the amputation • Each arms sizes • Horizontal extreme points
Arm measurements (2) • Pose 2
Presentation summary • Previous Works • Our contribution • Real-Time Posture Analysis • Background substraction • Precomputation: anthropometric measures • Posture Tracking • Mirror effect : Virtual arm • Results • Conclusion
Head and Torso detection • Head and Torso • Connexity research algorithm helped by the anthropometrics measures
Seek articulations • Seeking shoulder, elbow and wrist • Anthropometrics measurements → estimation of the positions
Missing limb creation • If before-elbow amputation • Coordinates systems of valid and amputee side are equivalent • Reprojection of pixels valid side → amputee side
Virtual arm creation • If below-elbow amputation • Coordinates system of valid and amputee side are equivalent • Reprojection of pixels valid side → amputee side
Results • Webcam (640*480) • About 8 to 10 frames / s
Remarks • Up • Follow-up the side-displacements of the silhouette • Whole image reflecting Better illusion for subject • Interactive time • Constrains • Subject must be facing the camera • For a better illusion the elbows angles have to be symmetric • Non Snake moves
Conclusion and future works • Experimental system • Simple posture tracking • Constrains but robust • Virtual arm creation • Next step • Experiment on amputee • Collaboration with ISC of Lyon • Perspectives • 3D-model to be more realistic • Amputees reactions to real experiments
Ajout du membre → réalité augmentée (RA) • Problème générique en RA • Cohérence entre réel et virtuel • Texture, aspect • Élément de synthèse construit à partir d’image réelle (cf notre système) • Illumination, Ombre
Creation du membre manquant • amputation humérale • centre de gravité du moignon • obtention d'un axe grâce a al même méthode que pour le bras valide • amputation cubitale • Même méthode que pour le bras valide • Obtention de l'axe du moignon grâce au centre de gravité de la partie après le coude