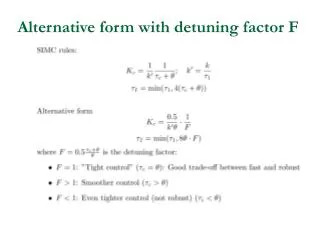
Alternative form with detuning factor F
Alternative form with detuning factor F. SIMC-tunings. QUIZ. Quiz: SIMC PI-tunings. y. y. Step response. t [s]. Time t. (a) The Figure shows the response (y) from a test where we made a step change in the input ( Δ u = 0.1) at t=0. Suggest PI-tunings for (1) τc=2,. (2) τc=10.
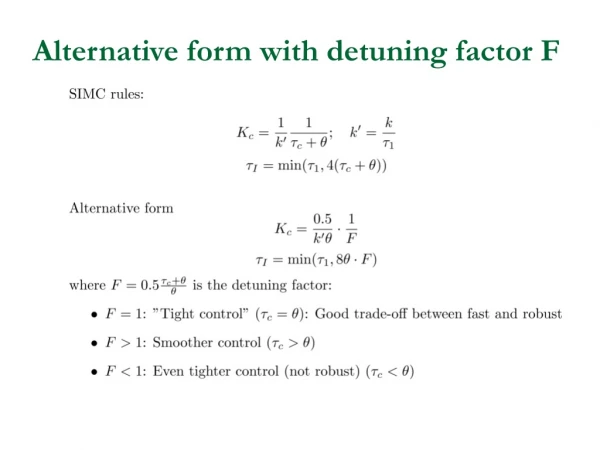

Alternative form with detuning factor F
E N D
Presentation Transcript
SIMC-tunings QUIZ Quiz: SIMC PI-tunings y y Step response t [s] Time t (a) The Figure shows the response (y) from a test where we made a step change in the input (Δu = 0.1) at t=0. Suggest PI-tunings for (1) τc=2,. (2) τc=10. (b) Do the same, given that the actual plant is
QUIZ Solution • Actual plant:
QUIZ Approximation of step response Approximation ”bye eye”
SIMC-tunings Kc=2.9, tauI=10 Kc=9.5, tauI=10 OUTPUT y INPUT u • Tunings from Step response “by eye” model • Setpoint change at t=0, input disturbance = 0.1 at t=50 Tunings from Half rule (Somewhat better) Kc=2, tauI=5.5 Kc=6, tauI=5.5
QUIZ Half-rule approach: Approximation of zeros depends on tauc!
Some discussion points • Selection of τc: some other issues • Obtaining the model from step responses: How long should we run the experiment? • Cascade control: Tuning • Controllability implications of tuning rules
Selection of c: Other issues • Input saturation. • Problem. Input may “overshoot” if we “speedup” the response too much (here “speedup” = /c). • Solution: To avoid input saturation, we must obey max “speedup”:
A little more on obtaining the model from step response experiments 1¼ 200 (may be neglected for c < 40) • “Factor 5 rule”: Only dynamics within a factor 5 from “control time scale” (c) are important • Integrating process (1 = 1) Time constant 1 is not important if it is much larger than the desired response time c. More precisely, may use 1 =1 for 1 > 5 c • Delay-free process (=0) Delay is not important if it is much smaller than the desired response time c. More precisely, may use ¼ 0 for < c/5 time ¼ 1 (may be neglected for c > 5) c = desired response time
Step response experiment: How long do we need to wait? • RULE: May stop at about 10 times effective delay • FAST TUNING DESIRED (“tight control”, c = ): • NORMALLY NO NEED TO RUN THE STEP EXPERIMENT FOR LONGER THAN ABOUT 10 TIMES THE EFFECTIVE DELAY () • EXCEPTION: LET IT RUN A LITTLE LONGER IF YOU SEE THAT IT IS ALMOST SETTLING (TO GET 1 RIGHT) • SIMC RULE: I = min (1, 4(c+)) with c = for tight control • SLOW TUNING DESIRED (“smooth control”, c > ): • HERE YOU MAY WANT TO WAIT LONGER TO GET 1 RIGHT BECAUSE IT MAY AFFECT THE INTEGRAL TIME • BUT THEN ON THE OTHER HAND, GETTING THE RIGHT INTEGRAL TIME IS NOT ESSENTIAL FOR SLOW TUNING • SO ALSO HERE YOU MAY STOP AT 10 TIMES THE EFFECTIVE DELAY ()
“Integrating process” (c < 0.2 1): Need only two parameters: k’ and From step response: Example. Step change in u: u = 0.1 Initial value for y: y(0) = 2.19 Observed delay: = 2.5 min At T=10 min: y(T)=2.62 Initial slope: Response on stage 70 to step in L y(t) 2.62-2.19 7.5 min =2.5 t [min]
Example (from quiz) Step response Δu=0.1 • Assume integrating process, theta=1.5; k’ = 0.03/(0.1*11.5)=0.026 • SIMC-tunings tauc=2: Kc=11, tauI=14 (OK) • SIMC-tunings tauc=10: Kc=3.3, tauI = 46 (too long because process is not actually integrating on this time scale!) INPUT y OUTPUT y tauc=10 tauc=2
Cascade control Cascade control
Cascade control Tuning of cascade controllers • Want to control y (primary CV), but have “extra” measurement y 1 2 • Idea: Secondary variable (y ) may be tightly controlled and this 2 helps control of y . 1 • Implemented using cascade control: Input (MV) of “primary” controller (1) is setpoint (SP) for “secondary” controller (2) • Tuning simple: Start with inner secondary loops (fast) and move upwards • Must usually identify ”new” model ( G1’ = G1 G21 K2 (I+K2G22)-1 ) experimentally after closing each loop • One exception: Serial process, G21 = G22 2 – Inner (secondary - 2) loop may be modelled with gain=1 and effective delay=( t + q ) c 2 See next slide
Cascade control Special case: Serial cascade y2 = T2 r2 + S2d2, T2 = G2K2(I+G2K2)-1 • K2 is designed based on G2 (which has effective delay 2) • then y2 = T2 r2 + S2 d2 where S2¼ 0 and T2¼1 · e-(2+c2)s • T2: gain = 1 and effective delay = 2+c2 • NOTE: If delay is in meas. of y2 (and not in G2) then T2¼ 1 ·e-c2s • SIMC-rule: c2 ≥ 2 • Time scale separation: c2≤c1/5 (approximately) • K1 is designed based on G1’ = G1T2 • same as G1 but with an additional delay 2+c2
Cascade control ys y2 y2s u G2 G1 K1 K2 y1 Example: Cascade control serial process d=6 Use SIMC-rules! Without cascade With cascade
Cascade control Tuning cascade control
Cascade control Tuning cascade control: serial process • Inner fast (secondary) loop: • P or PI-control • Local disturbance rejection • Much smaller effective delay (0.2 s) • Outer slower primary loop: • Reduced effective delay (2 s instead of 6 s) • Time scale separation • Inner loop can be modelled as gain=1 + 2*effective delay (0.4s) • Very effective for control of large-scale systems
Setpoint overshoot method Alternative closed-loop approach:Setpoint overshoot method • Procedure: • Switch to P-only mode and make setpoint change • Adjust controller gain to get overshoot about 0.30 (30%) • Record “key parameters”: • 1. Controller gain Kc0 • 2. Overshoot = (Δyp-Δy∞)/Δy∞ • 3. Time to reach peak (overshoot), tp • 4. Steady state change, b = Δy∞/Δys. • Estimate of Δy∞ without waiting to settle: Δy∞ = 0.45(Δyp + Δyu) • Advantages compared to Ziegler-Nichols: • * Not at limit to instability • * Works on a simple second-order process. Closed-loop step setpoint response with P-only control. M. Shamsuzzoha and S. Skogestad, ``The setpoint overshoot method: A simple and fast method for closed-loop PID tuning'', Journal of Process Control, 20, xxx-xxx (2010)
Proposed PI settings (including detuning factor F) Setpoint overshoot method Summary setpoint overshoot method From P-control setpoint experiment record “key parameters”: 1. Controller gain Kc0 2. Overshoot = (Δyp-Δy∞)/Δy∞ 3. Time to reach peak (overshoot), tp 4. Steady state change, b = Δy∞/Δys Choice of detuning factor F: • F=1. Good tradeoff between “fast and robust” (SIMC with τc=θ) • F>1: Smoother control with more robustness • F<1 to speed up the closed-loop response.
Setpoint overshoot method Example: High-order process P-setpoint experiments Closed-loop PI response
Setpoint overshoot method Example: Unstable plant First-order unstable process • No SIMC settings available Closed-loop PI response
CONTROLLABILITY A comment on Controllability • (Input-Output) “Controllability” is the ability to achieve acceptable control performance (with any controller) • “Controllability” is a property of the process itself • Analyze controllability by looking at model G(s) • What limits controllability?
CONTROLLABILITY Controllability Recall SIMC tuning rules 1. Tight control: Select c= corresponding to 2. Smooth control. Select Kc ¸ Must require Kc,max > Kc.min for controllability ) max. output deviation initial effect of “input” disturbance y reaches k’ ¢ |d0|¢ t after time t y reaches ymax after t= |ymax|/ k’ ¢ |d0|
CONTROLLABILITY Controllability
CONTROLLABILITY Example: Distillation column
CONTROLLABILITY Example: Distillation column
CONTROLLABILITY Conclusion controllability • If the plant is not controllable then improved tuning will not help • Alternatives • Change the process design to make it more controllable • Better “self-regulation” with respect to disturbances, e.g. insulate your house to make y=Tin less sensitive to d=Tout. • Give up some of your performance requirements