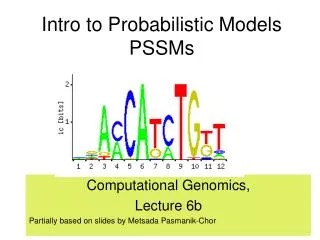
Download
1 / 68
680 likes | 700 Views
This talk provides an overview of different I/O Automaton models including basic, timed, hybrid, and probabilistic models. The talk will discuss their applications in distributed systems and theoretical algorithms, as well as future work in this field.

E N D
I/O Automaton Models: Basic, Timed, Hybrid, Probabilistic, Etc. Nancy Lynch, Dilsun Kirli, MIT University of Illinois, Urbana-Champaign, MURI Meeting October 4, 2002 Based on work with Roberto Segala, Frits Vaandrager
I/O Automata • Mathematical, infinite-state, automaton models. • Describe states, transitions. • Describe system modularity: • Parallel composition of interacting components. • Levels of abstraction. • Example: Generic distributed system • Diagram represents interfaces. • IOA models also describe behavior. • Abstract models for system components. • Channel: Implemented by TCP, modeled as reliable FIFO queue. • Node: Implemented by C++ program, modeled as algorithm automaton.
Reliable FIFO Channel Model send(m) receive(m) Channel(M) • Signature: • Inputs: • send(m), m in M • Outputs: • receive(m), m in M • States: • queue, a finite sequence of elements of M, initially empty • Transitions: • send(m) • Effect: Add m to end of queue • receive(m) • Precondition: m is first on queue • Effect: remove first element of queue
Levels of Abstraction TO-Bcast GCS GCS • Used in system development by successive refinement. • Top level: Specification for allowed behaviors. • Can write in same automaton style. • Refine through many levels, to code-like, detailed description. • Example: Group communication: • Automata used to represent totally-ordered reliable broadcast service, group communication service, and algorithm. • Composition of algorithm and GCS automata implements TO-Bcast automaton. • Continue, implementing GCS in terms of lower-level network.
Flavors of I/O Automaton Models • Basic IOAs deal with: • What happens, in what order (not when). • Discrete events (not continuous behavior). • Timing: TIOA • For describing timeout-based algorithms. • Local clocks, clock synchronization. • Timing/performance analysis. • Hybrid (continuous/discrete): HIOA • Systems with real world + computer components • Vehicle control: ground, air, space • Embedded systems • Probabilistic: PIOA, PTIOA, PHIOA • Randomized distributed algorithms • Security protocols • Safety-critical systems
Talk Outline • Brief overview of the models • HIOA model, in more detail (Lynch) • TIOA model (Kirli) • PIOA model (Lynch) • Future work on models • Future work on applications
I/O Automata (IOA) • Static description: • Actions a (input, output, internal) • States s, start states • Transitions (s, a, s'); input actions enabled in all states. • Dynamic description: • Execution: s0 a1s1a2s2 … • Trace: Sequence of input and output actions; externally visible behavior. • A implements B: traces(A) traces(B). • Operations for building automata: • Parallel composition, identifying inputs and outputs. • Action hiding. • Reasoning methods: • Invariant assertions: Property holds in all reachable states. • Simulation relations: Imply one automaton implements another. • Compositional methods
Example Applications • Theoretical distributed algorithms: • Mutual exclusion, Byzantine agreement, atomic object implementation, resource allocation, data management… • Distributed systems: • Orca DSM system: Two-layer model, following the implementation. Found, fixed logical error. Proofs. • Transis group communication system: Models for key layers. Proofs. Algorithmic improvements. • Ensemble GC system: Models for key layers. Found, fixed logical error. Proofs. • Algorithms for dynamic networks (new): • RAMBO reconfigurable atomic memory algorithm • Dynamic atomic broadcast algorithm
Timed I/O Automata (TIOA) • Add special time-passage actions, pass(t), to IOA model. • Example: Reliable FIFO channel that always delivers messages within time d. • send(m) • Effect: Add (m, now + d) to end of queue • receive(m) • Precondition: (m,u) is first on queue (for some u) • Effect: remove first element of queue • pass(t) • Precondition: for all (m,u) in queue, now + t u • Effect: now := now + t • Can use standard automaton-based reasoning methods: • Invariant: for all (m,u) in queue, now u now + d. • Inductive proofs.
Example Applications • Theoretical distributed algorithms: • Mutual exclusion, consensus,… • Timeout-based communication protocols: • TCP,… • Group communication systems: • Using GCS to build TO-Bcast: Conditional performance analysis. • Scalable GCS: Performance analysis. • RAMBO: Performance analysis. • Hybrid (continuous/discrete) systems: • RR crossing, steam boiler controller • Stretched TIOA capabilities; motivated HIOA.
Hybrid I/O Automata (HIOA) • TIOA plus facilities for representing continuous behavior. • Static description: • States: input, output, internal variables; start states • Actions: input, output, internal • Discrete steps (s, a, s') • Trajectories , mapping time intervals to states • Dynamic description: • Execution 0a11a22… • Trace: Project on external variables, external actions. • A implements B if traces(A) traces(B). • Operations: Composition, hiding • Reasoning methods: Invariants, simulation relations, compositional methods
Example Applications • Ground transportation: • People-mover (Raytheon) • California PATH automated highway system (Berkeley) • Aircraft control: • TCAS (Lincoln Labs) • Qwanser helicopter system (MIT Aero/Astro)
Probabilistic I/O Automata [Segala] • Adds probabilistic transitions (s, a, P), where P is a probability distribution on states. • Includes both nondeterminism and probability. • External behavior represented by a set of trace distributions (one for each “adversary”, who resolves nondeterminism). • Implementation represented by subset (of sets of trace distributions). • Example applications: • Randomized distributed algorithms: • Rabin-Lehmann Dining Philosophers • Aspnes-Herlihy randomized consensus • Security protocols
Hybrid Systems • Hybrid systems: Continuous, real-world components + discrete, computer components • Examples: • Automated transportation systems • Robots • Factory control systems • Embedded systems • Mobile systems • Complex • Strong safety, performance requirements
The HIOA Model • States, discrete transitions, trajectories. • Model plants, controllers, sensors, actuators, computer software, communication services, human operators. • Support for decomposing hybrid system descriptions: • External behavior: Models discrete and continuous interactions of component with its environment. • Composition: Synchronize external events, external trajectories. • Levels of abstraction: Implementation notion, respects external behavior. • Incorporate methods from control theory, computer science: • Control theory: Invariant sets, stability analysis using Lyapunov functions, robust control methods • Computer science: Invariants, simulation relations, compositional methods
Related Work • Phase transition systems [Maler, Manna, Pnueli 92], [Alur, Courcoubetis, Halbwachs,…95], [Kesten, Manna, Pnueli 98] • Hybrid control systems [Branicky 95, 98] • Hybrid reactive modules [Alur, Henzinger 96, 97]
Example: Hybrid Control System Plant Actuator Sensor Controller
Describing Hybrid Behavior • Universal set of variables • Static type:type(v), set of values v may take on. • Dynamic type:dtype(v), allowed “trajectories” for v: • Set of functions from left-closed intervals of R to type(v). • Closed under time shift, subinterval, countable pasting. • Examples: Pasting closure of constant functions, of continuous functions, of differentiable functions, of integrable functions.
Trajectories • Model evolution of variables over time intervals. • Valuation for V: Assigns value in type(v) to each v in V. • Trajectory: Let J be a left-closed interval, left endpoint 0. A J-trajectory for V is a function from J to valuations for V whose restriction to each variable v is in dtype(v). • Lemma: The set of trajectories for V together with the prefix ordering is an algebraic cpo. • Concatenation: At common point, use value from first trajectory.
Hybrid Sequences • Let A be a set of actions, V a set of variables. An (A,V)-sequence is an alternating sequence, 0a11a22…of trajectories over V and actions in A. • Models a series of discrete and continuous changes. • Lemma: The set of (A,V)-sequences together with the prefix ordering is an algebraic cpo. • Concatenation: At common point, use value from first (A,V)-sequence.
Hybrid I/O Automaton • U, Y, X: input, output, and internal (state) variables • V = U Y X • Q: states, a set of valuations of X • : start states • I, O, H: input, output, and internal actions • A = I O H • D Q A Q: discrete transitions • T: trajectories for V, in which the valuations of X are in Q. Closed under prefix, suffix, and countable concatenation.
Input-Enabling Axioms • Input action enabling: For every state q and every input action a, there is some discrete transition (q,a,q’). As for ordinary I/O automata. • Input trajectory enabling: For every state s and every input trajectory , there is some trajectory that starts with x, and either: • Spans all of , or • Spans a prefix of , after which some locally-controlled action is enabled.
Executions and Traces • Execution fragment of HIOA A: • An (A,V)-sequence 0a11a22…, where: • Each iis a trajectory of A, and • Each (i.lstate, ai ,i+1.fstate) is a discrete step of A. • A,V are all the actions and variables of A. • Only states need match up. • Execution of A: • Fragment beginning in a start state. • Trace of an execution fragment: • Restrict to external actions E, external variables W. • (E,W)-sequence. • Aimplements B if they have the same external interface and tracesA tracesB.
Notation • We specify sets of trajectories using differential and algebraic equations (or inclusions). • Trajectory satisfies algebraic equation v = e if the constraints on the variables expressed by this equation hold in every state of . • Trajectory satisfies differential equation d(v) = e if for every t in the domain of : v(t) = v(0) + 0t e(t’) dt’ (“weak solutions”) • Algebraic/differential inclusions are handled similarly.
Example: Vehicle HIOA Vehicle acc-in vel-out acc, vel • Follows a suggested acceleration to within an error of 0. Reports real velocity. • U: acc-in • Y: vel-out • X: vel, acc; Q: all valuations of X • : vel = 0, acc = 0 • I, O, H, D: empty • Trajectories T: • d(vel) = acc • acc(t) [acc-in(t)- , acc-in(t) + ], for t > 0 • vel-out = vel • No constraints on input variables in initial states of trajectories.
Example: Controller HIOA Controller vel-out acc-in vel-sensed acc-suggested clock • Suggests accelerations for a vehicle with the intention of ensuring that the velocity does not exceed a pre-specified velocity, vmax. • Monitors velocity, computes suggestion every time d. • Q: Valuations in which clock d. • : 0 everywhere • H: suggest • D: suggest transitions where • clock = d, clock’ = 0, • vel-sensed’ = vel-sensed • vel-sensed + (acc-suggested’+ ) d vmax
Controller Trajectories • d(acc-suggested) = 0 • d(clock) = 1 • vel-sensed(t) = vel-out(t), for t > 0 • acc-in = acc-suggested
Simulation Relation • Let A, B be HIOAs with the same external interface. • Relation R from states of A to states of B satisfying: • Every start state of A is related to some start state of B. • If xAR xB and is an execution fragment of A consisting of one action surrounded by two point trajectories, with .fstate = xA, then B has a closed execution fragment with .fstate = xB, trace() = trace(), and .lstate R .fstate. • If xAR xB and is an execution fragment of A consisting of a single closed trajectory, with .fstate = xA, then B has a closed execution fragment with …
Simulation relation • Theorem: If there is a simulation relation from A to B then A implements B (inclusion of trace sets). • Example: • Vehicle(1) implements Vehicle(2), if 1 2 • Show using simulation relation: identity mapping
Composition • Assume A1 and A2 are compatible (no common outputs, internal actions/variables are private). • Compose A1 and A2 by matching up external actions, variables: • Y = Y1 Y2; X = X1 X2; U = (U1 U2 ) - (Y1 Y2 ) • O = O1 O2; H = H1 H2; I = (I1 I2 ) - (O1 O2 ) • Start states : Projections in 1, 2 • Discrete steps D: Projections in D1, D2 • Trajectories T: Projections in T1, T2 • Technicality: Composition need not satisfy input flow enabling, pre-HIOA. Assume “strong compatibility”. Holds in many interesting special cases.
Composition Theorems • Projection and Pasting: Assume A = A1 || A2. Then tracesA is exactly the set of (E,W)-sequences whose restrictions to A1 and A2 are traces of A1 and A2, respectively. • Substitutivity: If A1 implements A2 and both are compatible with B, then A1 || B implements A2 || B.
Example: Vehicle and Controller • Vehicle || Controller: • Invariant of Vehicle || Controller: vel vmax. • Can prove this using a standard inductive argument. • Uses auxiliary invariants, most importantly: vel + (acc-suggested + ) (d – clock) vmax Vehicle Controller vel-out vel-sensed acc-suggested clock acc-in acc, vel
Hiding • ActHide(E,A) reclassifies the external actions in E as internal actions. • (New) VarHide(W,A) removes the external variables in W (but retains their induced constraints on the trajectories). • (Previously) VarHide(W,A) reclassified external variables in W as internal (state) variables.
Example • In the composition Vehicle || Controller, we may hide the acc-in variable, which is used for communication between the components: A = VarHide({acc-in}, Vehicle || Controller) • In A, the only external variable is vel-out. • Express the correctness of A by showing that it implements an abstract specification HIOA VSpec. • VSpec expresses just the constraints vel vmax, and vel-out = vel. • Show correctness using a simulation relation.
Progressive HIOAs • HIOAs should provide some response from any state, for any sequence of input actions and input trajectories. • HIOAs should not block the passage of time: they should allow time to pass to infinity, if their environment does so. • Definition: A pre-HIOA is progressive if it has no execution fragments in which it generates infinitely many locally-controlled actions in finite time. • Theorem: A progressive HIOA A can accommodate any input hybrid sequence, from every state: For each state x of A and each (I,U)-sequence , there is some execution fragment from x such that (I U) = . • Theorem: The composition of progressive pre-HIOAs is progressive.
Receptive HIOAs • But progressiveness isn’t enough: • HIOAs involving only upper bounds on timing are not progressive. • Such specifications are common. • Definition: A strategy for a pre-HIOA A is an HIOA A’ that is the same as A except that D’ D, and T’ T. • Nondeterministic, memoryless. • Definition: A pre-HIOA is receptive if it has a progressive strategy. • Theorem: A receptive pre-HIOA can accommodate any input hybrid sequence. • Theorem: Let A1 and A2 be compatible receptive HIOAs with strongly compatible progressive strategies B1 and B2. Then A1 || A2 is a receptive HIOA with progressive strategy B1 || B2.
Applications • Raytheon people-mover [Lynch, Weinberg, Delisle] • California PATH automated highway system: Analysis of platoon maneuvers [Dolginova, Lygeros, Lynch] • TCAS [Livadas, Lygeros, Lynch] • Qwanser helicopter system [Mitra, Wang, Feron, Lynch]
TCAS model Aircraft Aircraft Sensor Sensor Pilot Pilot Conflict detector Conflict detector Channel Conflict resolver Conflict resolver Channel
From HIOA to TIOA • Hybrid systems: continuous, real-world components + discrete, computer components • Timed systems: continuous, time + discrete, computer components • Correctness depends not only on the order of events but also on their timing. • Example: Reliable FIFO channel that always delivers messages within time d.
Work in Progress • Canonical model for timing-based systems • External behavior • Composition • Levels of abstraction • Identify major ideas from related models and express them in the common framework of TIOA • Timed automata [Alur and Dill] • Timed transition systems [Maler, Manna, Pnueli] • Clock GTA [DePrisco]
Describing Timing Behavior • Timing behavior is described by using the same concepts as in HIOA: • Variables • Static and dynamic types • Trajectories • Hybrid sequences
Timed I/O Automata • X: internal variables • Q: states, a set of valuations of X • : start states • I, O, H: input, output, internal actions • A = I O H • D Q A Q: discrete transitions • T: trajectories for X, in which the valuations of X are in Q. Closed under prefix, suffix, and countable concatenation.
Execution and Traces • Execution fragment of TIOA A: • An (A,V)-sequence 0a11a22…, where: • Each iis a trajectory of A, and • Each (i.lstate, ai ,i+1.fstate) is a discrete step of A. • A,V are all the actions and variables of A. • Execution of A: Fragment beginning in a start state. • Trace of an execution fragment: • Restrict to external actions E, empty set of variables. • (E,)-sequence.
Example: Time bounded channel • X: clock, queue • Q: all valuations of X • : clock=0, queue is empty • I: send(m) • O: receive(m) • Transitions: • send(m) • Effect: add (m,clock + d) to end of queue • receive(m) • Precondition: (m,u) is first on queue and clock u • Effect: remove the first element of queue • Trajectories t satisfy: • d(clock)=1 • (t queue) is a constant function
Untiming Operation • Transform a timed automaton A to an untimed automaton Untime(A,R) • Define a notion of congruence. • Let R be a congruence for A. • States of Untime(A,R): the set of equivalence classes of R. • Untime(A,R) has a special internal action to represent time passage. • Theorem: If is an execution of A, then Untime(A,R) has an execution ’ such that trace(’)=discrete(trace()) and vice versa. • Similar to region construction of Alur and Dill • Theorem: The equivalence relation used by Alur-Dill in region construction is a congruence
Properties for I/O Automata • A property for A is a subset of the execution fragments of A. • P is a livenessproperty provided that for any state x of A, there is some execution fragment from x that is in P. • We say that A is receptive forP provided that there exists a strategy A’ for A such that every execution fragment of A’ is in P. • Theorem: If A1 is receptive for P1 and A2 is receptive for P2 then A1 || A2 is receptive for P1 || P2.