SQUIGGLE Nano-Manipulator System
SQUIGGLE Nano-Manipulator System. Multidisciplinary Senior Design I – P13372 Cory Behm Sakif Noor Jon Rosebrook. Project Team. Cory Behm (ME), Jon Rosebrook (ME), and Sakif Noor (ME). Meeting Agenda. Product Introduction Mechanical Systems Direct Comparison Controls Future Plans

SQUIGGLE Nano-Manipulator System
E N D
Presentation Transcript
SQUIGGLE Nano-Manipulator System Multidisciplinary Senior Design I – P13372 Cory Behm SakifNoor Jon Rosebrook
Project Team Cory Behm (ME), Jon Rosebrook (ME), and Sakif Noor (ME)
Meeting Agenda • Product Introduction • Mechanical Systems • Direct Comparison • Controls • Future Plans • Questions/Concerns
Mission Statement • Design and build a low-cost, high-resolution nanomanipulator • Must use the SQUIGGLE piezoelectric linear actuators from New Scale Technologies. • Demonstrate its capabilities in RIT’s Nano-Bio Interface Laboratory
Project Description • Nanomanipulators are high resolution positioning instruments, and when used with high magnification devices, has the ability to maneuver objects thousands of times smaller than what can be seen with the human eye. • High costs ($10-50K) and inaccessibility of nanotechnology is very limiting to research • We need to develop a low-cost, high resolution, three-axis Cartesian nanomanipulator • SQUIGGLE piezoelectric linear actuators • Sponsored by New Scale Technologies, a local company in Victor, NY • To be used at RIT’s Nano-Bio Interface Laboratory
Customer Needs Below is what the customer expects the group to try and accomplish in the design of the nanomanipulator along with its relative importance.
Customer Specifications Specific requirements from the customer that address characteristics (or metrics) related to this project.
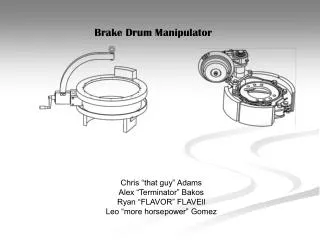
SQUIGGLE Motor • A SQUIGGLE motor consists of several piezoelectric ceramic actuators attached to a threaded nut, with a mating threaded screw inside. • Piezoelectric actuators change shape when electrically excited • Applying power to the actuators creates ultrasonic vibrations, causing the nut to vibrate in an orbit - similar to a person's hips in a "Hula Hoop." SQUIGGLE info and pictures from http://www.newscaletech.com/squiggle_overview.html
Squiggle motor advantages • No parasitic drag - less wasted power • Zero backlash (with a light pre-load) • 500 nanometer resolution • Relatively High force • Smooth velocity at microscopic speeds • Off-power hold • Standard linear motors feature direct linear drive - no gearbox • The speed and position of the threaded screw can be precisely controlled. SQUIGGLE info from http://www.newscaletech.com/squiggle_overview.html
Squiggle Motor Photos are found in New Scale Technologies Manual – http://www.newscaletech.com/downloads_registered/02892-6-0000_SQL-RV-1p8_MotorManual.pdf
House of Quality • The House of Quality document is a diagram used for defining the relationship between customer needs and the product’s engineering specifications (or customer specifications). • The House of Quality provides a raw score of the relationship, thus allowing the team to rank the importance of completing the given relationship. • The House of Quality allows us to create a Pareto chart.
House of Quality Importance Rating: 1 = Low Importance 3 = Moderate Importance 5 = High Importance Relationships: 9 = Strong 3 = Moderate 1 = Weak 0 = No Relationship
Carriage and Track • Assumed friction coefficient of 0.002 • Found online for similar product
Gravity System Problems • Less Reliable • Many parts to get stuck • Shaking • Unforgiving • Hanging mass size constrained to guide • Small mass ~5grams low return force • Time Constraint against Spring System
Magnetic Trackers • Distance between encoder and magnet is ~0.25 mm
Motor Load • Aiming for 7 mm/s each axis should be capable of at over 10 grams more. Expected coefficient of friction is 0.002.Motors are capable of producing forces required
Spring Stopper Overloaded with full weight of moving axes (though it shares this with another) and 60 grams force from the spring, which would cause the motor to stall. Material: ABS Plastic Matweb tensile strength at yield 20.0 - 61.4 Mpa FS>9.17
Bottom Housing Material: ABS Plastic Matweb tensile strength at yield 20.0 - 61.4 Mpa FS>42
Link-Y Overloaded with full weight of moving axes (though it shares this with another part) and 60 grams force from the motor, which would cause the motor to stall. Material: DelrinAcetal Solid Works yield strength 63000000 FS>77.7
Link-Holder Material: DelrinAcetal Solid Works yield strength 63000000 FS>90
Cost Analysis Total = $379.10 Before Machining Cost
Test Plan • Speed • Travel • Resolution • Weight • Dimensions
Future plans • Final Project Review – Prepare for MSD II • Order Parts • Manufacture Parts • Build and Test Components
Questions??? Thank you for coming!