Download
1 / 22
220 likes | 315 Views
第 4 章 可编程序控制器的编程指导. 一、 PLC 编程特点和原则 (一)、 PLC 编程特点 梯形图编程是 PLC 的第一编程语言,是最常用的方法。梯形图源于传统的继电接触器控制电路图,发展到现在两者之间存在较大差别。 1 、程序的执行顺序 ( 1 ) PLC 程序按扫描执行的结果如图 4.1 所示。这种扫描执行方式的优点是可滤掉高频干扰,增强抗干扰能力。其缺点是产生响应滞后,影响可靠性。.

E N D
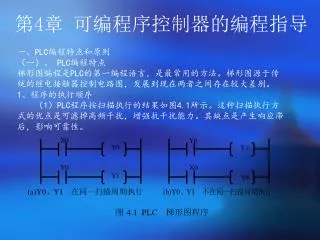
第4章 可编程序控制器的编程指导 一、PLC编程特点和原则 (一)、 PLC编程特点 梯形图编程是PLC的第一编程语言,是最常用的方法。梯形图源于传统的继电接触器控制电路图,发展到现在两者之间存在较大差别。 1、程序的执行顺序 (1)PLC程序按扫描执行的结果如图4.1所示。这种扫描执行方式的优点是可滤掉高频干扰,增强抗干扰能力。其缺点是产生响应滞后,影响可靠性。
(2)继电器电路图和PLC梯形图执行顺序比较,参看图4.2。当X0闭合后,对于继电器电路来说Y0、Y1同时得电。而在PLC程序中,X0闭合后,Y0先输出,Y1后输出。(2)继电器电路图和PLC梯形图执行顺序比较,参看图4.2。当X0闭合后,对于继电器电路来说Y0、Y1同时得电。而在PLC程序中,X0闭合后,Y0先输出,Y1后输出。 2、继电器自身的延时效应 继电器电路中由于继电器自身的延时效应,当X0动作后,其输出Y0、Y1不能同时得电与断电,与PLC梯形图相比较,如图4.3所示。在PLC梯形图中,当X0动作后,其输出Y0、Y1同时得电与断电,这与继电器电路是不同的。
3、PLC中的软继电器 所谓软继电器是指PLC存储空间中的一个可以寻址的位。在PLC中软继电器的种类多、数量大。 例如FP0型PLC的内部继电器(R0~R62F)共有1008个,特殊继电器(R9000~R903F)共64个,定时器/计数器144个。 寄存器中触发器的状态可以读取任意次,相当于每个继电器有无数个常开和常闭触点供编程中使用。 (二)、 PLC编程原则 学习了PLC的指令系统后,就可以根据实际系统的控制要求编制程序,下面就来说明编程的基本原则。 1、 PLC软继电器的触点可以多次重复使用 PLC的输入/输出继电器、内部继电器、定时器、计数器等器件的接点可多次重复使用,无需用复杂的程序结构来减少接点的使用次数。 2、梯形图的编制原则 梯形图的每一行都是从左母线开始,线圈终止于右母线。触点不能放在线圈的右边。
3、线圈一般不能与左母线相连(a)用内部继电器常闭触点实现输出图4.4 规则3的说明TMX0 K100R0R9010TMX0 K100(b)用内部特殊继电器实现输出 除步进程序外,任何继电器线圈、定时器、计数器、高级指令等不能直接与左母线相连。如果需要,可以通过一个没有使用的内部常OFF继电器的常闭触点或者特殊内部常ON继电器的常开触点来连接,参看图4.4。 (a)用内部继电器常闭触点实现输出 4、不允许双线圈输出 同一编号的线圈在一个程序中使用两次称为双线圈输出。双线圈输出容易引起误操作,应尽量避免线圈的重复使用。
5、程序中不允许出现桥式电路 在PLC程序中,不能用桥式电路直接编程,参看图4.5 。 6、程序的编写顺序 程序的编写顺序应按自上而下、自左至右的方式编写。为了减少程序的执行步数,程序应为“左大右小,上大下小”,如图4.6和图4.7所示。
(a)不符合左大右小的电路(共5步) 图4.7 规则6的说明 二、 PLC 编程实例 (一)、 生产线上自动分拣系统的 PLC 应用 1、概述 过去工厂检验产品时都采用手工作业,抽样检查,为了提高产品的质量和节省人手而采用了自动测定系统。考虑到系统结构紧凑及经济实用,采取松下PLC与LM 激光传感器的组合,能达到既经济又紧凑的目的。本文着重介绍 FP1、 LM 激光传感器以及上位机监控构成的实际使用系统。参见图 4.8。
2、系统构成 首先由传感器把距离转化为电信号,然后通过 A/ D模块采集,PLC 主机进行数据处理,控制及通讯,监控系统进行数据储存, 分析等,参见图 4.9 。 (1) LM 激光传感器 把距离转化为模拟信号。 (2)数据采集 将模拟信号转化为数字信号。 (3)控制处理 采用松下 FP1型 的 PLC 主机进行控制处理。 (4)监控系统 用 IBM微机,用 VB 软件编写的界面进行人机对话,并把 PLC 传来的数据记录存储到硬盘上,还可以画出动态时序图, 正态分布图,即时打印。分析研究加工条件和产生残次品的关系与运行状况,对生产知识的积累具有实际意义。
图4.9 系统结构示意图 3、部分硬件的设计 LM 激光传感器是采用松下 LM10 系列测量距离模拟传感器,具有高精度的测量和比较输出的功能。它的原理是用激光二极管发射出波长为 685mm的激光束,遇到障碍物反射回来,先后的时间差为Δt。LM 激光传感器是由探测体与控制体两个部分组成,其参数见表 4-1 和表 4-2 。
(1)探测体的选用 根据被测体的尺寸、测量精度、传输带宽度及安装的位置,我们就可以确定探测体型号。假设被测体的尺寸为 50 毫米,测量精度为 0.05 毫米,传输带宽度为 100 毫米,可以选探测体型号 ANR1150 ,检测中心距离为 50 毫米,检测精度为 0.005 um 。这样被测体两面在探测体的中心位置上,能减少检测误差,按图尺寸安装被测体的尺寸范围,可以在30mm~70mm,参看图4.10。 (2)控制体的选用 探测体与控制体是配套产品,它们之间的连接不必考虑。主要考虑控制体与A/D模块的匹配,A/D模块的输入信号有多种选择(输入0~5V;0~10V;0~20mA三种),根据A/D模块输入信号可以选择它们相近的信号,由表2可以查出,型号为ANR5141的模块输出信为4~20mA与A/D模块相近。把LM1的输出信号接在A/D模块的第一通道(CH0),LM2的输出信号接在A/D模块的第二通道(CH1)。
4、PLC的编程 我们检验被测体的尺寸有四种可能:①合格——测定范围内;②不合格——尺寸偏小;③不合格——尺寸偏大;④检测系统有出错可能——溢出测定范围。在上位机监控系统中设置测定上限值、测定下限值及测定值,并通过串行口传递给PLC,PLC把数据分别存在DT12、DT11、DT10中,对采集实际的数据进行比较。 (1)数据处理 探测体的信号传给控制体产生4~20mA的电信号,经过A/D模块转换成数字信号,由于A/D模块输入的信号时0~20mA对应的数字值为0~1000,我们还不能直接使用该数字,需要经过处理才能使用。也就是说,LM传感器检测的范围是±10mm对应4~20mA,经过A/D模块产生数字范围是200~1000,这样很容易得出实际的1mm相当于PLC处理的数据40。 通过PLC把LM1的数据读入存储器DT100中,把LM2的数据读入存储器DT101中,此时读入的数据加上中心距离减10mm,才是LM传感器到被测体的一面的距离。即:4、PLC的编程 我们检验被测体的尺寸有四种可能:①合格——测定范围内;②不合格——尺寸偏小;③不合格——尺寸偏大;④检测系统有出错可能——溢出测定范围。在上位机监控系统中设置测定上限值、测定下限值及测定值,并通过串行口传递给PLC,PLC把数据分别存在DT12、DT11、DT10中,对采集实际的数据进行比较。 (1)数据处理 探测体的信号传给控制体产生4~20mA的电信号,经过A/D模块转换成数字信号,由于A/D模块输入的信号时0~20mA对应的数字值为0~1000,
我们还不能直接使用该数字,需要经过处理才能使用。也就是说,LM传感器检测的范围是±10mm对应4~20mA,经过A/D模块产生数字范围是200~1000,这样很容易得出实际的1mm相当于PLC处理的数据40。我们还不能直接使用该数字,需要经过处理才能使用。也就是说,LM传感器检测的范围是±10mm对应4~20mA,经过A/D模块产生数字范围是200~1000,这样很容易得出实际的1mm相当于PLC处理的数据40。 通过PLC把LM1的数据读入存储器DT100中,把LM2的数据读入存储器DT101中,此时读入的数据加上中心距离减10mm,才是LM传感器到被测体的一面的距离。即: L1(DT110)=DT100+(50-10)×40=DT100+1600 L2(DT111)=DT101+(50-10)×40=DT101+1600 LM1与LM2的距离为:L=150×40=6000 被测体实际的尺寸为:D(DT112)=L-(L1+L2)
(2)梯形图程序 PLC梯形图程序如图4.11所示。 读LM1 读LM2 L1=LM1+1600 L2=LM2+1600 L3=LM1+LM2 D=6000-L3 比较是否合适 不合格上限以上 合格 不合格下限以下 溢出测定范围 标志传给上位机 实际尺寸传给上位机 图4.11 PLC程序梯形图
X0:LM激光模拟传感器—1输入;X1:LM激光模拟传感器—2输入;X2:测定定时输入;X0:LM激光模拟传感器—1输入;X1:LM激光模拟传感器—2输入;X2:测定定时输入; WY9:为CH0的地址;WY10:为CH1的地址 PLC根据DT20的值可以对不同的次品进行分类,把不同的次品 放在相对应的料槽里。 随着市场的激烈竞争,产品的质量要求越来越高,以往的人工抽样检查,无法满足生产的要求。采用自动生产线可以对产品逐一进行检查,由上位机设定检查的允许上、下限值,对所有产品实现自动检查,这样大大提高了产品质量,节省了人力,提高了生产经济效益。 (二)、FP0的PWM(脉宽调制)功能在变频调速系统中的应用 1、概述 变频器应用于电梯控制系统中的调速部分是现行工程发展的方向。传统的电梯工程一般采用大、中型PLC和A/D、D/A模块以及电梯专用变频器对专用电机进行速度控制。本文介绍一种小型PLC利用其PWM专用指令,不需A/D、D/A模块即可对变频器进行变频调速的方法,以期对中小型电梯企业提供一些借鉴。 脉宽调制PWM(pulse width modulation),即PLC输出的幅值、频率不变,占空比变化的信号。松下小型PLC如FP0具有PWM功能的指令,可直接控制变频器的启动、停止、无级调速运行等。现以六层电梯模型中的变频调速为例,论述PWM的应用设计。
2、PLC-变频器调速系统的构成 设计的PWM变频调速系统是由松下FP0型PLC、小型VF0变频器、旋转编码器、三相异步电动机、上位机等组成的具有速度反馈环节的闭环控制系统。 (1)变频器接线图 变频器的主电路接线较简单,从变频器的主回路端子U、V、W相接入三相异步电动机即可,主接线图略。本文只给出变频器与PLC控制电路接线图,如图4.12所示。 变频器控制端子 图4.12 PLC与变频器控制电路接线图 (2)闭环控制系统构成 为了控制电梯的平层定位精度,设计了具有速度反馈环节的闭环控制系统,如图4.13所示。实现闭环控制有两种方法:一种是采用内置PID变频器,利用变频器内部PID的功能形成自闭环;另一种是不采用内置PID变频器,上位机做总闭环计算的控制,其优点是采用上位机做各种PID的算法,计算速度快,控制精度高,采用FP0的专用PID指令,实现简单。其特点是所有的反馈信号都接到上位
上位机(计算机或PLC) 频率给定信号 反馈信号: 电压、电流 或脉冲信号 变频器 变频器电源 电机及检测元件 图4.13 闭环控制系统的设计 机,由上位机通过PWM信号输出控制变频器运行的速度。
3、PLC脉宽调制(PWM)程序梯形图设计 F170是PWM输出专用指令,在图4.14中“n”可设为K0或K1。当设定为K0时,脉宽调制波占用内部寄存器0通道,当R10为ON时,其输出波形由Y0输出;当“n”值设为K1时,脉宽调制波占用内部寄存器1通道,其输出波形由Y1输出。PWM脉宽调制波通过驱动器接到变频器的输入端子,变频器接受此信号后,输出频率改变,从而控制三相异步电机的转速。当PLC程序中DT21数据发生变化时,输出脉冲占空比随之而改变,变频器控制的电机转速相应发生变化。 R10 F170 PWM , DT20 , K0 s n 图4.14 PWM指令使用说明 由于高速计数器与PWM不能占用同一个通道。因此还需设置系统寄存器400来选择通道。FP0中高速计数器占用内部寄存器0通道,PWM只能用内部寄存器1通道。“n”值设定后,程序运行是不能改变的。图4.15为PWM初始化程序,DT20数据寄存器存放脉冲周期,K13位对应脉冲周期1ms,DT21中的数据为占空比的设定值,PLC在每次扫描时占空比都可以根据DT21值的改变而改变,用户可以通过F0(MV)指令来修改DT21的值,以达到修改PWM脉宽调制波占空比的目的。频率设置在PWM指令运行后不能再改变其参数。
初始化PWM控制指令 R9013 F0 MV , K13 , DT20 初始脉 冲信号 PWM控 制模式 F0 MV , K13 , DT21 PWM频 率控制 R9010 F170 PWM , DT20, K1 常闭 继电器 PWM控 制模式 图4.15 初始化梯形图设计 作为应用设计,必须考虑电梯运行平稳、舒适,还需考虑设计电梯的加减速程序。经过多次试验,结果表明电梯加减速的参数与楼层高度、速度、加减速时间等有关。图4.16、图4.17为电梯加减速运行的梯形图程序。 4.17为电梯加减速运行的梯形图程序。 减速程序设计:减速从当前速度开始,以一定斜率下降到一定值,在此数值确定的频率下运行,直至平层。当检测有轿厢减速信号且DT21数据寄存器中PWM波形输出占空比的值大于10%时,PWM输出按0.5%
R800 R9018 > DT21 , K100 (DF) 1 PWM频 率控制 0.01s时 钟脉冲 轿厢减 速信号 F27- , DT21 , K5 , DT21 1 PWM频 率控制 PWM频 率控制 图4.16 电梯减速梯形图程序 (如K5)不宜过小,过小会导致到平层时减速缓慢;也不宜过大,过大会导致平层出现过冲。
图4.17 电梯加速梯形图程序 加速程序设计:加速从零速开始,以一定斜率上升到一定值,在此数值确定的频率下运行。改变此梯形图中按比例递加值(K5)可以改变加速斜率。改变比较指令中数据K750的值可以限定加速后达到的最快速度。如本设计变频器最大频率设定为70Hz,则电梯稳定运行的频率为70×75%=52.5Hz。