Download
1 / 8
90 likes | 279 Views
Chapter 4 Shortest Path Label-Setting Algorithms. Introduction & Assumptions Applications Dijkstra’s Algorithm. Problem Definition & Assumptions.

E N D
Chapter 4Shortest Path Label-Setting Algorithms Introduction & Assumptions Applications Dijkstra’s Algorithm
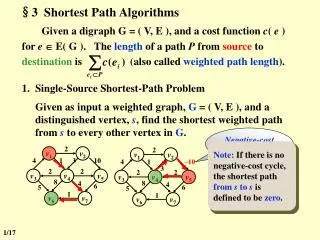
Problem Definition & Assumptions Problem: Given a network G = (N, A) in which each arc (i, j) has an associated length or cost cij, let node s be the source. The length of a directed path is the sum of the lengths of the arcs in the path. For every node i s, find a shortest length directed path from s to i. Assumptions: • All arc lengths are integers (if rational but not integer, multiply them by a suitably large number) • The network contains a directed path from node s to every node i s (if not, add an arc (s, i) with very large cost) • The network does not contain a negative cycle (otherwise see Ch. 5) • The network is directed (transform undirected arcs w/positive costs as in Ch. 2; undirected arcs w/negative costs will create neg. cycles)
Types of Shortest Path Problems • Single-source shortest path • One node to all others with nonnegative arc lengths – Chapter 4 • Variations: maximum capacity path, maximum reliabiltiy path • One node to all others with arbitrary arc lengths – Chapter 5 • All-pairs shortest path: every node to every other node – Chapter 5 String model for shortest path from s to t: Arcs = strings, knots = nodes; hold s and t and pull tight. Shortest paths will be taut: for i and j on a shortest path connected by arc (i, j), distance s-i plus cij distance s-j Associated “dual” maximization problem: pulling s and t as far apart as possible
Single-Source Shortest Paths Solution is a shortest-path tree rooted at s. Property 4.1. If the path s = i1 – i2 – … – ih =k is a shortest path from s to k, then for every q = 2, 3, …, h-1, the subpath s = i1 – i2 – … – iq is a shortest path from the source node to iq. Property 4.2. Let the vector d represent the shortest path distances. Then a directed path P from s to k is a shortest path if and only if for Store the shortest path tree as a vector of n-1 predecessor nodes: pred(j) is the node i that satisfies above equality.
Acyclic Networks: Reaching Examine the nodes in topological order; perform a breadth-first search to find a shortest-path tree. Reaching Algorithm: 0.d(s) 0, d(j) for j s, i s 1. If A(i) is empty, then stop. Otherwise, to examine node i, scan the arcs in A(i). If for any arc (i, j), d(j) d(i) + cij, then set d(j) = d(i) + cij. 2. Set i to the next node in topological order and return to 1. Solves shortest path problem on acyclic networks in O(m) time.
Dijkstra’s Algorithm Shortest paths from source node to all other nodes with nonnegative arc lengths (cycles permitted) Output: d(i) is the distance from s to i along a shortest path pred(i) is the predecessor of i along a shortest path Intermediate: S = set of permanently labeled nodes (L in GIDEN) set of temporarily labeled nodes (P in GIDEN) GIDEN also has set U for unlabeled nodes At each iteration, one node moves to S from
Complexity • Node selection requires time proportional to • Distance updates are performed for each arc emanating from node i; total of m updates in the entire algorithm • Since • For dense networks, • Complexity can be improved for sparse networks by cleverness and special data structures