
Adaptive filter based on LMS Algorithm used in different fields
E N D
Presentation Transcript
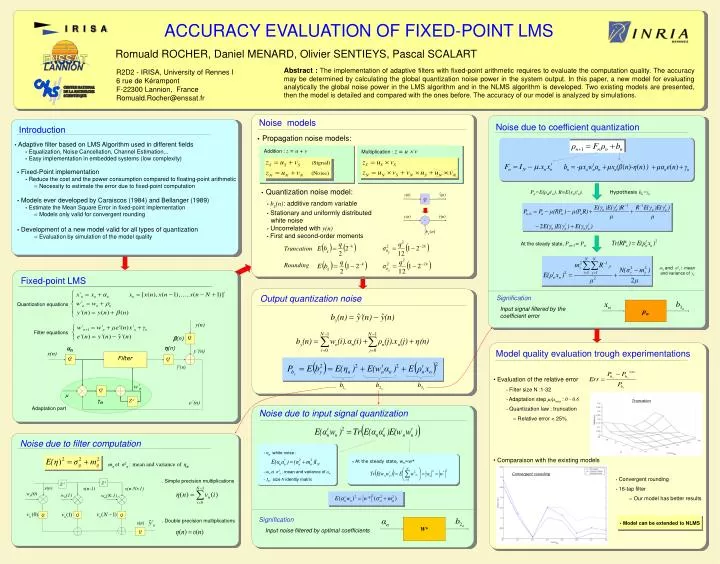
R2D2 - IRISA, University of Rennes I 6 rue de Kérampont F-22300 Lannion, France Romuald.Rocher@enssat.fr I R I S A ACCURACY EVALUATION OF FIXED-POINT LMS Romuald ROCHER, Daniel MENARD, Olivier SENTIEYS, Pascal SCALART Abstract :The implementation of adaptive filters with fixed-point arithmetic requires to evaluate the computation quality. The accuracy may be determined by calculating the global quantization noise power in the system output. In this paper, a new model for evaluating analytically the global noise power in the LMS algorithm and in the NLMS algorithm is developed. Two existing models are presented, then the model is detailed and compared with the ones before. The accuracy of our model is analyzed by simulations. Noise models • Adaptive filter based on LMS Algorithm used in different fields • Equalization, Noise Cancellation, Channel Estimation... • Easy implementation in embedded systems (low complexity) • Fixed-Point implementation • Reduce the cost and the power consumption compared to floating-point arithmetic • Necessity to estimate the error due to fixed-point computation • Models ever developed by Caraiscos (1984) and Bellanger (1989) • Estimate the Mean Square Error in fixed-point implementation • Models only valid for convergent rounding • Development of a new model valid for all types of quantization • Evaluation by simulation of the model quality Noise due to coefficient quantization Introduction • Propagation noise models: Addition :z = u + v Multiplication :z = u v • Quantization noise model: • bg(n): additive random variable • Stationary and uniformly distributed white noise • Uncorrelated with y(n) • First and second-order moments Pn=E(ρnρtn), R=E(xnxtn), Hypothesis bn=γn Q + At the steady state, Pn+1= Pn Truncation Rounding mγand σ2γ : mean and variance ofγn Fixed-point LMS Output quantization noise Signification ρn Quantization equations Input signal filtered by the coefficient error y(n) Filter equations Q (n) (n) n y’(n) Model quality evaluation trough experimentations x(n) Filter Q Q • Evaluation of the relative error • Filter size N :1-32 • Adaptation step µ/µmax: 0 - 0.6 • Quantization law : truncation • Relative error < 25% • Comparaison with the existing models w’n Q µ γn Z-1 Truncation e’(n) Adaptation part Noise due to input signal quantization Noise due to filter computation • αnwhite noise : • mαet σ2α: mean and variance ofαn • IN: sizeNidentity matrix • At the steady state, wn=w* mηet σ2η: mean and variance of ηn Convergent rounding • Convergent rounding • 16-tap filter • Our model has better results . Simple precision multiplications Z-1 Z-1 x(n) x(n-1) x(n-N+1) wn(0) wn(1) wn(N-1) Q Q Q Signification . Double precision multiplications W* • Model can be extended to NLMS Input noise filtered by optimal coefficients Q