Download
1 / 11
120 likes | 344 Views
GOES Users Conference (GUC) Current Status on Advanced Baseline Imager. November, 2009. Terminology. Prototype Model (PTM) Not a flight instrument Pathfinder to demonstrate ABI design and test program Qualification model for ABI design and test program

E N D
GOES Users Conference(GUC)Current Status on Advanced Baseline Imager November, 2009
Terminology • Prototype Model (PTM) • Not a flight instrument • Pathfinder to demonstrate ABI design and test program • Qualification model for ABI design and test program • Built, integrated, and in the midst of instrument-level testing • Protoflight Model (PFM) • First flight instrument • Will be tested at protoflight levels • Many components and some assemblies are in production • Ground Processing Development System (GPDS) • Implementation of all ABI ground processing algorithms on real hardware run in real time proving latency requirements are met • Same software used to process PTM data
Executive Summary: ABI Meeting Mission Requirements • ABI is a significant advancement over current Imager • System design proven robust • System architecture has not changed since PDR • Completed PTM subsystem testing • Bench test ongoing • PTM (pathfinder) is doing its job • Risks mitigated early to ensure successful flight program
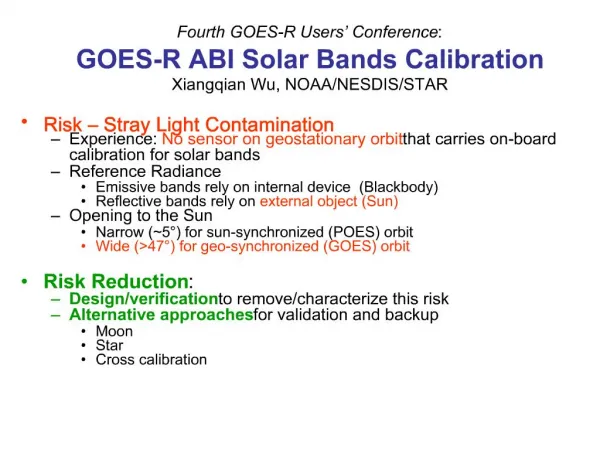
Cryo-cooler Control Electronics Operation of Active Cooler Sensor Unit Collect Scene Radiance & convert to Counts Electronics Unit Command & Control and Data Packeting ABI System Consists of 3 Units Plus Ground Algorithms Algorithms Decompression, Calibration, Navigation, & Resampling
ABI vs. GOES-N Imager: 48x Increase in Information Plus Operational Flexibility Temporal: 6x Full Earth disk: 5 minute vs. 30 minutes 15 minutes: 1 full Earth disk + 3 CONUS + 30 mesoscales Spectral: 3x 16 channels (0.47-13.3 µm) vs. 5 channels (0.64 - 13.3 µm) Spatial: 2x 0.64 µm channel = 14 µrad (0.5 km) vs. 28 µrad (1 km) 0.47, 0.86, and 1.61 µm channels = 28 µrad (1 km) Other channels = 56 µrad (2 km) vs. 116 µrad (4 km) 24/7 Operations Operation through eclipse and within 3° of sun Data rate: 26x < 66.6 Mbps compressed vs. 2.6 Mbps uncompressed 5
Strengths of ITT’s ABI Scans parallel to equator with no image plane rotation Greatly simplifies ground processing Doesn’t require a yaw flip But can operate in yaw flipped configuration by setting a single bit – ground commanding need not change Scan patterns and rates fully configurable on orbit New scenes and timelines can be uploaded post launch Optimized system delivers no gaps with little overlap (1%) INR performance delivered for all images, not just full disk Rapid slews generate little spacecraft disturbance Optimized slew profiles 6
PTM Instrument Bench Test Underway • Integration successfully completed on 5/28 • Bench test phases 2 of 3 completed • Performance data collected for all electrical and most optical tests • Images collected and processed • Operational scan scenarios successfully executed • System architecture remains stable • GSE and test developments on-track to support system test • PTM completion in 2010 Completed ABI PTM Sensor Unit
PTM Demonstrating ABI Design • System design remains stable • No architectural changes since PDR • PTM executing scan mode 3 & 4 timelines • Scanner works • Producing images • Sensor Unit modal testing correlated SU FEM first modes • 1st mode at 57.6 Hz; 2nd mode at 63.6 Hz • Coherent noise data: no significant frequency content • Polarization: performance meeting expectations PTM Is Effectively and Efficiently Paving the Path to Flight
Input generated by AIPS Earth, space look, and blackbody all simulated Unique gain & offset for every detector element All sources of noise added Bit-trimmed & compressed GPDS processing: Decompression Calibration Using space look & blackbody scenes Navigation Resampling Ground Processing Algorithms Performance Demonstrated Using Simulated Data Channel 9.61 um – 2.0 km (LWIR) No striping in final image! Same algorithms used toprocess PTM data 10
Summary - PTM Collecting Real Images Scan Modes 3 and 4 work Custom timelines work Mechanisms for collecting data work well Mechanisms for adjusting instrument performance are working Data collections presenting real data to analysis teams and software PTM Demonstrating ABI Will Deliver Significantly ImprovedImager Data for Weather Forecasting & Other Products 11