Download
1 / 19
190 likes | 361 Views
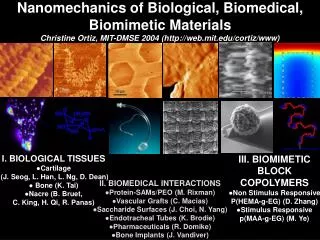
3.052 Nanomechanics of Materials and Biomaterials. LECTURE # 5 : EXPERIMENTAL ASPECTS OF HIGH-RESOLUTION FORCE SPECTROSCOPY II. Prof. Christine Ortiz DMSE, RM 13-4022 Phone : (617) 452-3084 Email : cortiz@mit.edu WWW : http://web.mit.edu/cortiz/www.

E N D
3.052 Nanomechanics of Materials and Biomaterials LECTURE # 5 : EXPERIMENTAL ASPECTS OF HIGH-RESOLUTION FORCE SPECTROSCOPY II Prof. Christine Ortiz DMSE, RM 13-4022 Phone : (617) 452-3084 Email : cortiz@mit.edu WWW : http://web.mit.edu/cortiz/www
II. displacement detection system A Typical High-Resolution Force Spectroscopy Technique : General Components I. high-resolution force transducer computer • controls system • performs data acquisition, display, and analysis d sample III. high-resolution displacement control z d = transducer displacement or deflection z = displacement of sample normal to sample surface
F k = F 0 F d REVIEW : LECTURE #2 : Experimental Aspects of High-Resolution Force Spectroscopy I : The High-Resolution Force Transducer How do we measure such small forces (i.e. nN or pN) ? High Resolution Force Sensor or Transducer that is : 1) soft and 2) small • microfabricated cantilever beams and probe tips : deflect in response to an applied force (e.g. types, dimensions, attachments, material properties, cantilever beam theory) • a force transducer or sensor can be represented by a linear elastic, Hookean spring : F=kd d=displacement at end of cantilever (m) we measure in force spectroscopy experiment F=external force applied to cantilever (N) we calculate from d k=cantilever “spring constant” = 3EI/L3 (N/m) we know independently E=Young’s (elastic) modulus of cantilever material (Pa) I=moment of inertia of cross-sectional area (m4) L=cantilever length (m) • force transducer sensitivity : kkeff • force detection limits : thermal noise limitation (*model force transducer as a free, 1-D harmonic oscillator) : <Fm2>1/2 = (kBTk) <Fm 2>1/2~k
Cantilever Beam Theory d F 0 L x d(max)
repulsive d>0 rest position d=0 d<0 attractive surface force sample surface Example of a Force Transducer : The Cantilever Beam (*NRL : http://stm2.nrl.navy.mil/how-afm/how-afm.html)
Fundamental Limit of Force Detection cantilever d
Stiffness Requirements for a Force Transducer : Force Sensitivity FT=F=Fs dT=d+ds FT,dT k F=kd ks Fs=ksds sample surface
Displacement Detection : Optical Lever (Beam) Deflection Technique Lateral Force Microscopy (LFM) VA+C-VB+D mirror A B VA+ B-VC+D C D Normal Force Microscopy (NFM) 4-quadrant position sensitive photodiode laser beam cantilever sample probe tip
A B C D A B A B C D C D d<0 d>0 Displacement Detection : Optical Lever (Beam) Deflection Technique ZERO FORCE : mirror 4-quadrant position sensitive photodiode laser beam d=0 cantilever probe tip REPULSIVE FORCE : ATTRACTIVE FORCE :
Displacement Control :How can we move something one nanometer at a time?
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + “Poling” of Piezoelectric Materials
Displacement Control :Piezoelectric Tube Scanners z y x (*Digital Instruments “JV” PZT scanner) D+DD d D -Z L+DL ~ +Z L voltage applied -X +Y +X electrodes connecting wires polarization
Conversion of z-Displacement Data, z to Tip-Sample Separation Distance, D IN-CONTACT :REPULSIVE FORCE IN-CONTACT : ZERO FORCE OUT-OF-CONTACT : ATTRACTIVE FORCE d z d sample sample z piezo D piezo sample piezo
Atomic Force Microscope (AFM)* : General Components and Their Functions (*Binnig, G.; Quate, C. F.; Gerber, Ch. Phys. Rev. Lett. 1986, 56 (9), 930-933) A B mirror laser diode C D cantilever position sensitive photodetector d 10°-15° sensor output d F sample probe tip piezoelectric scanner computer z
Surface Forces Apparatus : (*Israelachvili, J.N., et al. J. Chem. Soc. Faraday Trans. 1978, 74, 975.) (http://squid.ucsb.edu/~sfalab/mark-III.html) New surface forces apparatus (SFA Mk III) for measuring the forces between two molecularly smooth surfaces. Mk III employs four distance controls instead of three as in Mk II. The four controls are: micrometer, differential micrometer ,different spring and piezoelectric tube. The mica surfaces are glued to cylindrical support disks of radius R and positioned in a crossed cylinder geometry. The lower surface is mounted on a variable-stiffness double-cantilever force-measuring spring within the lower chamber and is connected to the upper (control) chamber via a Teflon bellows.
3D trapping potential trapped particle ~mm cover slip objective lens trapping laser beam Optical Tweezers (*Ashkin, et al. Phys. Rev. Lett.1985, 54, 1245.) (*http://www.embl-heidelberg.de/CellBiophys/LocalProbes) (*http://atomsun.harvard.edu/~tweezer/2j.jpg)
Biomembrane Surface Probe (*R. MERKEL*†, P. NASSOY*‡, A. LEUNG*, K. RITCHIE* & E. EVANS*§ Nature 397, 50 - 53 (1999)) Vertical Assembly- The epi-illuminated microscope images the nanoscale positional changes of the probe microsphere. Light from arc clamp D is made monochromatic though filter F1 and linearly polarized through polarizer P1. The light travels to objective E to reflect from the sample container and probe microsphere is recollected by the objective. An analyzer polarizer P2 enhances image contrast before imaging by camera C and digitization and analysis by computer A. Simultaneously computer A using feedback from the analyzed image controls the high voltage power supply B that drives piezo element F and hence controls the probe assembly position above the sample. pressurized glass pipet force transducer microsphere probe
Typical Force Versus Distance Curve on a Stiff Substrate RAW DATA CONVERTED DATA substrate compression no interaction repulsive regime jump-to-contact Photodiode Sensor Output, s (V) Force, F (nN) 0 adhesion kc attractive regime 0 0 z-Piezo Deflection, z (nm) Tip-Sample Separation Distance, D (nm)