CHAOS AND THE DOUBLE PENDULUM
210 likes | 584 Views
CHAOS AND THE DOUBLE PENDULUM. By Nick Giffen (James Madison University) & Laura Marafino (University of Mary Washington). Overview. What is the double pendulum and why are we studying it? Governing equations and Numerical Methods Use of the Immersive Visualization System. What is Chaos?.

CHAOS AND THE DOUBLE PENDULUM
E N D
Presentation Transcript
CHAOS AND THE DOUBLE PENDULUM By Nick Giffen (James Madison University) & Laura Marafino (University of Mary Washington)
Overview • What is the double pendulum and why are we studying it? • Governing equations and Numerical Methods • Use of the Immersive Visualization System
What is Chaos? • If we take two identical double pendulums and start them with almost identical (yet still different) initial conditions, what will happen? • When do we get chaos? When don’t we get chaos?
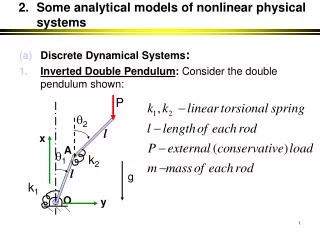
Introduction to Parameters Gravitational acceleration Mass of bob 1 Mass of bob 2 Length of arm 1 Length of arm 2 = 1+m1/m2
Initial Conditions Angle the first arm makes with vertical Angle the second arm makes with vertical Angular velocity of the first arm Angular velocity of the second arm
Governing Equations • Standard Equations • Use the Lagrangian • Polynomial Equations • Use elementary substitutions on standard equations
Numerical Methods • Runge-Kutta 4th order (RK4) • Runge-Kutta-Fehlberg 4th/5th order (RKF45) • Modified Picard method
Polynomial or Standard? • Energy conserved better in both RK4 and RKF45 with polynomial equations • Adaptive time steps larger in RKF45 with polynomial equations • Polynomial equations used for the Modified Picard method • Why are the Polynomial equations more useful in the Runge-Kutta methods? • Avoids needless approximate function evaluations (sine, cosine, exponents, etc.) after the first iteration • Computer only adds or multiplies every iteration thereafter which it can do exactly
Fortran Data Files STANDARD EQUATIONS RKF45 METHOD INITIAL ENERGY = 52.97316 for time = 0.930: x1 = -0.5439 y1 = -0.8391 x2 = -0.2745 y2 = -1.8021 Energy = 52.97527 for time = 0.940: x1 = -0.5133 y1 = -0.8582 x2 = -0.3565 y2 = -1.8458 Energy = 52.97350 for time = 0.950: x1 = -0.4752 y1 = -0.8799 x2 = -0.4403 y2 = -1.8792 Energy = 52.97104 for time = 0.960: x1 = -0.4291 y1 = -0.9032 x2 = -0.5245 y2 = -1.8987 Energy = 52.96865 for time = 0.970: x1 = -0.3755 y1 = -0.9268 x2 = -0.6067 y2 = -1.8997 Energy = 52.96735 for time = 0.980: x1 = -0.3170 y1 = -0.9484 x2 = -0.6834 y2 = -1.8789 Energy = 52.96690 for time = 0.990: x1 = -0.2581 y1 = -0.9661 x2 = -0.7511 y2 = -1.8362 Energy = 52.96738 for time = 1.000: x1 = -0.2033 y1 = -0.9791 x2 = -0.8082 y2 = -1.7754 FINAL Energy = 52.96757 POLYNOMIAL EQUATIONS RKF45 METHOD INITIAL ENERGY = 52.97316 for time = 0.930: x1 = -0.5439 y1 = -0.8391 x2 = -0.2743 y2 = -1.8021 Energy = 52.97317 for time = 0.940: x1 = -0.5133 y1 = -0.8582 x2 = -0.3564 y2 = -1.8458 Energy = 52.97318 for time = 0.950: x1 = -0.4752 y1 = -0.8799 x2 = -0.4401 y2 = -1.8792 Energy = 52.97320 for time = 0.960: x1 = -0.4291 y1 = -0.9032 x2 = -0.5243 y2 = -1.8987 Energy = 52.97318 for time = 0.970: x1 = -0.3755 y1 = -0.9268 x2 = -0.6065 y2 = -1.8998 Energy = 52.97308 for time = 0.980: x1 = -0.3170 y1 = -0.9484 x2 = -0.6832 y2 = -1.8789 Energy = 52.97319 for time = 0.990: x1 = -0.2581 y1 = -0.9661 x2 = -0.7510 y2 = -1.8362 Energy = 52.97337 for time = 1.000: x1 = -0.2032 y1 = -0.9791 x2 = -0.8080 y2 = -1.7755 FINAL Energy = 52.97340
How Accurate is the Simulation? • Is chaos really observed in the simulation actually due to numerical error? …NO! • Choosing a time step and showing any subsequent smaller time steps will produce the same result • Total energy display
Poincaré Maps and Energy Surfaces Two products of the chaotic double pendulum
Double Pendulum on the Immersive Visualization System • Display up to 73 double pendulums at once • Slightly varied IC’s for each one • Computational power allows us to advance far into the “future” • Zooming capabilities • 5X5 central display • Narrowing the range of IC’s • Current displays • IC’s • Energy
Acknowledgements Advisors Dr. James Sochacki & Dr. William Ingham Supported by James Madison University’s College of Science and Mathematics Computer Programmers Joshua Blake, Justin Creasy, Garrett Allen, & John Suarez Additional Assistance Dr. David Pruett Tina Liu